Paso 6: Hack 3: hacer la impresora mueva!
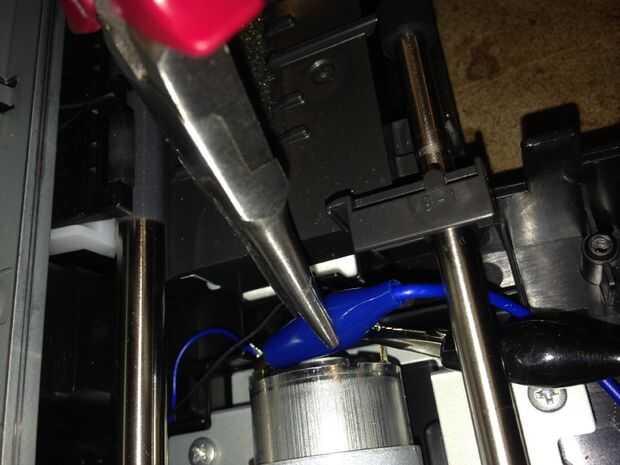
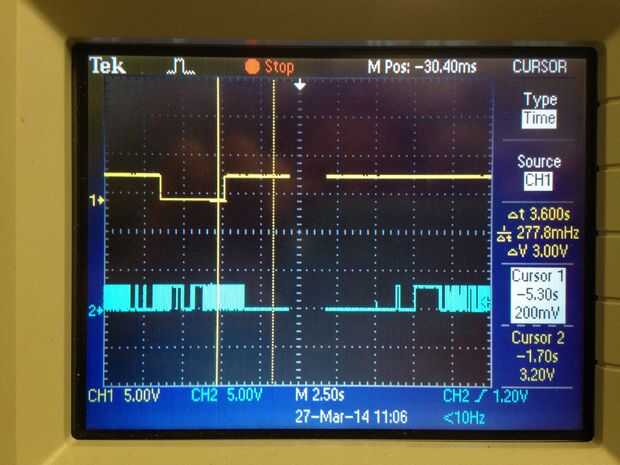




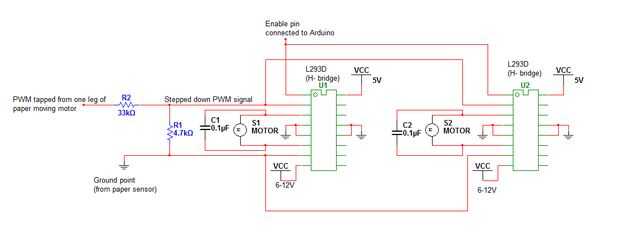
Tomar la señal que va para el papel de motor en movimiento, la bajar y darle a las ruedas del PrintO-Bot a través de un puente en H: en el diagrama del circuito, el "PWM aprovechado..." es de color azul (o de color claro) alambre de la mudanza de papel motor, mientras que "Tierra punto de..." es el pin del cable negro en el sensor de papel (se muestra en el paso anterior).
Tendrás que experimentar con el voltaje dado a cambio de motores del bot la tensión para ajustar la velocidad de PrintO-bot para que la impresión franjas alinearán lo suficientemente bien como para dar una impresión casi exacta. (Estoy haciendo un método más robusto para hacer esto. Lo actualizaré aquí)
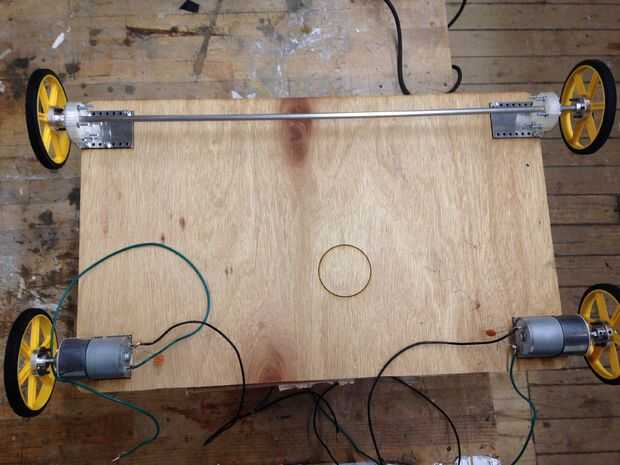
Usé motores de la c.c. de alto esfuerzo de torsión a mi robot ya que tiene que iniciar y detener de manera muy precisa, mientras que lleva a sí mismo. Los motores, ruedas y soportes eran de chip ventas. Ya tenemos para montar las ruedas con mucha precisión, es una buena idea de láser cortar la base con las dimensiones exactas para todos los componentes que vas montados en él.
Partes utilizadas:
http://www.Pololu.com/Product/1103
http://www.Pololu.com/Product/1084
http://www.Pololu.com/Product/1083
http://www.Pololu.com/Product/1437
http://www.McMaster.com/#1272t36/=semdej
Una vez hecho esto, 3D imprimí las piezas para montar el chasis sobre ruedas 4








")




