Paso 5: código
Biblioteca de PID
Biblioteca de rebote
Codificador rotatorio
Pantalla de LCD I2C
MAX6675
Nota: En "MAX6675.h" tienes que sustituir la línea 11 (#include "WProgram.h") con
#if defined(ARDUINO) & & ARDUINO > = 100
#include "Arduino.h"
#else
#include "WProgram.h"
#endif
para hacerlo funcionar con Arduino 1.05
Utiliza la biblioteca "LiquidCrystal" en el código de sub carpeta 1.0 2004, ignorar "LiquidCrystal_I2C".
Cuando un programa está seleccionado en la tarjeta SD o una temperatura es establecer manualmente, el controlador comienza leyendo la temperatura siempre 0,1 segundos y calcula el siguiente pulso largo con biblioteca de PID de la calefacción. Como estamos usando un montón de diferentes bibliotecas usé más de 99,5% de toda la memoria flash gratis el chip atmega 328. Peor aún, tuve que acortar el texto y el menú de la pantalla LCD, como corría fuera de SRAM. La próxima vez, sería probablemente usando un atmega 2560 o intercambiar algunas cadenas en la EEPROM.
Los diferentes programas que se guardan como archivos de texto separados por comas con incremento de nombres de archivo (1.txt... 10.txt) en la carpeta raíz de la SD. El diseño de los archivos debe tener este aspecto:
1. línea: título (máximo 20 caracteres)
2. línea: primera temperatura set point, primera velocidad de calentamiento, duración primera
3. línea: segundo set point de temperatura, segundo velocidad de calentamiento, duración segunda
4. línea...
Puede utilizar un máximo de 10 líneas por archivo. Tiene que ser terminada con una línea en blanco.
Usé un Arduino UNO para cargar el código siguiente en el Atmega:
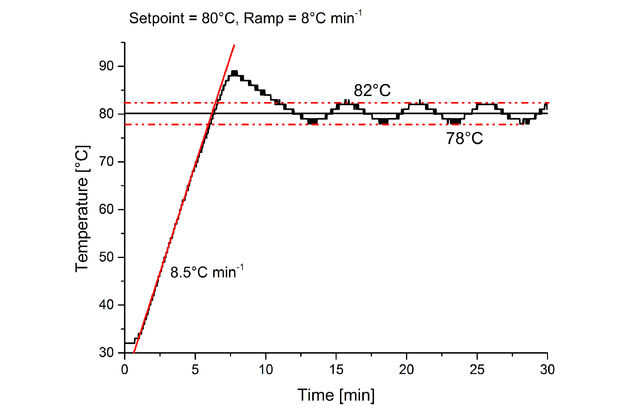
//Temperature Controller #include <MAX6675.h> //LCD #include <Wire.h> #include <LCD.h> #include <LiquidCrystal_I2C.h> #include <SD.h> #include <PID_v1.h> //Rotary Encoder #include <Encoder.h> Encoder roundEnc(2, 3); //Pushbutton on rotary encoder #include <Bounce.h> Bounce pushButton = Bounce(4 ,5); #define I2C_ADDR 0x3F // Define I2C Address where the LCD is #define BACKLIGHT_PIN 3 #define En_pin 2 #define Rw_pin 1 #define Rs_pin 0 #define D4_pin 4 #define D5_pin 5 #define D6_pin 6 #define D7_pin 7 LiquidCrystal_I2C lcd(I2C_ADDR,En_pin,Rw_pin,Rs_pin,D4_pin,D5_pin,D6_pin,D7_pin); //Temperatursensor int tCS = 7; // CS pin on MAX6675 int tSO = 9; // SO pin of MAX6675 int tSCK = 8; // SCK pin of MAX6675 int units = 1; // Units to readout temp (0 = raw, 1 = ˚C, 2 = ˚F) int TCError = 0; // ErrorFlag - TC Error int tempVal = 0; // Actual-Temperatur //Display unsigned long lastMeas = 0; // Last temperature measurement unsigned long lastDisp = 0; // Last display change unsigned long lastTempDisp = 0; // Last temperature update on display unsigned long lastLog = 0; // Last Logstate unsigned long logTime = 0; int lastDispTemp = -1; int dispOn = 0; // blink int cPosX = -1; // x-position (cursor) on display int cPosY = -1; // y-position on display String emptyString = " "; unsigned long lastDispPrg = 0; //Zeit seit letztem Update des Programm-Displays // Has the button on the rotary encoder been pressed? // 0 = no // 1 = yes // 2 = yes, for more than 2 seconds int buttonPressed = 0; // Rotational Encoder // 0 = not changed // 1 = clockwise // 2 = counterclockwise int rotationState = 0; int rotationNumber = 0; int lastRotationNumber = 0; int rotationBigLeap = 0; //was the rotationl encoder moved more than ~20° int oldRotState = 0; //Program state // 0: No program // 1: Manual Setpoint // 2: Load from SD // 3: not used // 4: Program is running int progState = 0; int subProgState = 0; int lastProgState = -1; int lastSubProgState = -1; // Programs from SD-Card int progCount = 0; byte progLnCount = 0; byte progTSp[10] = {0, 0, 0, 0, 0, 0, 0, 0, 0, 0}; byte progSprr[10] = {0, 0, 0, 0, 0, 0, 0, 0, 0, 0}; word progTime[10] = { 0, 0, 0, 0, 0, 0, 0, 0, 0, 0}; //Which type of program is running at the moment? //-1 = 0; //0 = Single-Point //>1 = SD-Card int progRun = -1; int runLine = -1; // Actual subprogram of the SDCard unsigned long runTime = 0; // How long is the step running already unsigned long stepTime = 0; // How much time to increase the ramp unsigned long lastPuls = 0; // Last heating puls int minutesPast = 0; boolean SDOpen = false; int aTsp = 0; int Tsp = 120; //Setpoint °C int MaxT = 190; // Maximal T °C byte Sprr = 15; //Rate °C/m byte MaxR = 20; // Maximale Ramp int TAlert = 200; // Shutown Temperature int Tdig1 = Tsp/100; //Digits for Tsp int Tdig2 = (Tsp%100)/10; int Tdig3 = Tsp%10; int Rdig1 = Sprr/10; //Digits for Rp int Rdig2 = Sprr%10; // Initialize the MAX6675 Library for our chip // Setup Serial output and LED Pin // MAX6675 Library already sets pin modes for MAX6675 chip! MAX6675 temp(tCS,tSO,tSCK,units); //PID Parameters double Setpoint, Input, Output; PID myPID(&Input, &Output, &Setpoint,2,5,1, DIRECT); void setup() { //Serial.begin(9600); lcd.begin (20,4); // Switch on the backlight lcd.setBacklightPin(BACKLIGHT_PIN,POSITIVE); lcd.setBacklight(HIGH); lcd.noBlink(); lcd.clear (); pinMode(10, OUTPUT); //SC-Pin SD-Card //pinMode(53, OUTPUT); //SC-Pin SD-Karte - Arduino mega //digitalWrite(53, HIGH); pinMode(6, OUTPUT); //heating pin } void loop() { //disable Heating digitalWrite(6, LOW); //get user input getButtonState(); getRotState(); //change display setState(); //Update display displayState(); //Update Temperature //Faster measurement when program is running. In the programming stage the LCD lags if (progState == 4){ getTemp(); updateProgram(); Input = tempVal; Setpoint = aTsp; myPID.Compute(); heatingPuls(); if ((lastLog + 1000) < millis()){ updateLog(); lastLog = millis(); } } else if ((lastMeas + 10000) < millis()){ getTemp(); lastMeas = millis(); } if ((tempVal > TAlert) || ( TCError ==1 )) { stopProgram(); delay(5000); } } void getButtonState(){ unsigned long pushTime = pushButton.duration(); pushButton.update(); //How long was the button pressed - abort? boolean pushed = pushButton.fallingEdge(); if ((pushed == true) && (pushTime < 1500) ){ buttonPressed = 1; } else if ((pushed == true) && (pushTime >= 1500) ){ buttonPressed = 2; } else { buttonPressed = 0; } } void getRotState(){ //int roataionState = 0; //int rotationNumber = 0; - Scale 0-10 long tempState = roundEnc.read(); if (tempState > oldRotState) { rotationState = 1; // rotationNumber = (tempState%100)/10; int tempRotationNumber = (tempState%100)/10; if (tempRotationNumber != rotationNumber) { rotationBigLeap = 1; } rotationNumber = tempRotationNumber; if (rotationNumber < 0) { rotationNumber = 10 + rotationNumber; } oldRotState = (tempState%100); roundEnc.write(oldRotState); } else if (tempState < oldRotState) { rotationState = 2; // rotationNumber = (tempState%100)/10; int tempRotationNumber = (tempState%100)/10; if (tempRotationNumber != rotationNumber) { rotationBigLeap = 1; } rotationNumber = tempRotationNumber; if (rotationNumber < 0) { rotationNumber = 10 + rotationNumber; } oldRotState = (tempState%100); roundEnc.write(oldRotState); } else { rotationState = 0; rotationBigLeap = 0; } } void resetRotState(int digit){ //For entering numbers in the LCD rotationNumber = digit; //Failsave if ((rotationNumber > 10) || (rotationNumber < 0)) { rotationNumber = 0; } oldRotState = digit * 10; roundEnc.write(oldRotState); } //Verarbeite Eingaben am Display void setState(){ //Rotationstate 1 = right //Rotationstate 2 = left //Long pressing: abort if ((progState != 0) && (buttonPressed == 2)) { stopProgram(); buttonPressed = 0; return; } //submenu 0,1 if ((progState == 0) && (rotationState != 0)){ int select = rotationNumber%2 + 1; subProgState = select; displayState(); return; } //choose menu entry //manual setpoint if ((progState == 0) && (buttonPressed == 1)){ if (subProgState == 1) { progState = 1; subProgState = 0; displayState(); buttonPressed = 0; return; } //SD-Card if (subProgState == 2) { progState = 2; subProgState = 0; displayState(); buttonPressed = 0; return; } } //Submenue 0,1 - manual mode if ((progState == 1) && (subProgState < 4) && (rotationState == 1) && (rotationBigLeap == 1)){ subProgState = subProgState + 1; if (subProgState > 3) { subProgState = 0; } displayState(); rotationBigLeap = 0; return; } if ((progState == 1) && (subProgState < 4) && (rotationState == 2) && (rotationBigLeap == 1)){ subProgState = subProgState - 1; if (subProgState < 0) { subProgState = 3; } displayState(); rotationBigLeap = 0; return; } //Back, TSP, Rp, Start in Manual Mode if ((progState == 1) && (subProgState == 0) && (buttonPressed == 1)) { stopProgram(); buttonPressed = 0; return; } if ((progState == 1) && (subProgState == 1) && (buttonPressed == 1)) { subProgState = 11; buttonPressed = 0; return; } if ((progState == 1) && (subProgState == 2) && (buttonPressed == 1)) { subProgState = 21; buttonPressed = 0; return; } if ((progState == 1) && (subProgState == 3) && (buttonPressed == 1)) { startProgram(0); buttonPressed = 0; return; } //1., 2., 3. Digit T-Setpoint if ((progState == 1) && (subProgState == 11) && (buttonPressed == 1)) { subProgState = 12; buttonPressed = 0; return; } if ((progState == 1) && (subProgState == 12) && (buttonPressed == 1)) { subProgState = 13; buttonPressed = 0; return; } if ((progState == 1) && (subProgState == 13) && (buttonPressed == 1)) { //Last digit subProgState = 1; Tsp = Tdig1 * 100 + Tdig2 * 10 + Tdig3; if (Tsp > MaxT) { Tsp = MaxT; } //Maximal Temperature Tdig1 = Tsp/100; //Digits for Tsp Tdig2 = (Tsp%100)/10; Tdig3 = Tsp%10; buttonPressed = 0; return; } //1., 2. Digit ramp if ((progState == 1) && (subProgState == 21) && (buttonPressed == 1)) { subProgState = 22; buttonPressed = 0; return; } if ((progState == 1) && (subProgState == 22) && (buttonPressed == 1)) { //Last digit subProgState = 2; Sprr = Rdig1 * 10 + Rdig2; if (Sprr > MaxR) { Sprr = MaxR; } //Maximal/minimal ramp if (Sprr < 1) { Sprr = 1; } Rdig1 = Sprr/10; //Digits for Rp Rdig2 = Sprr%10; buttonPressed = 0; return; } //Submenu 1,1 - SD-Programm if ((progState == 2) && (subProgState < 11) && (rotationState == 1) && (rotationBigLeap == 1)){ subProgState = subProgState + 1; if (subProgState > progCount) { subProgState = 1; } displayState(); rotationBigLeap = 0; return; } if ((progState == 2) && (subProgState < 11) && (rotationState == 2) && (rotationBigLeap == 1)){ subProgState = subProgState - 1; if (subProgState < 1) { subProgState = progCount; } displayState(); rotationBigLeap = 0; return; } if ((progState == 2) && (subProgState < 11) && (buttonPressed == 1)){ startProgram(subProgState); buttonPressed = 0; return; } } void stopProgram(){ progState = 0; subProgState = 0; progRun = -1; runLine = -1; lastSubProgState = -1; lastProgState = -1; displayState(); myPID.SetMode(MANUAL); } void startProgram(int runType){ progRun = runType; aTsp = tempVal; runTime = millis(); runLine = 0; progState = 4; myPID.SetMode(AUTOMATIC); logTime = millis(); } void updateProgram() { //SD-Card //progLnCount //runline minutesPast = 1.0 * ((millis() - runTime) / 60000.0); if (progRun > 0){ Tsp = progTSp[runLine]; Sprr = progSprr[runLine]; //Load new program? if (minutesPast >= progTime[runLine]) { runLine++; if (runLine > progLnCount) { stopProgram(); return; } runTime = millis(); } } //Ramp long timeStep = (1000.0 * 60.0) / (double)Sprr; if ((stepTime + timeStep < millis()) && (aTsp < Tsp)) { aTsp++; stepTime=millis(); } else if ((stepTime + timeStep < millis()) && (aTsp > Tsp)) { aTsp--; stepTime=millis(); } } void heatingPuls(){ //pulse every 0.1 s if ((lastPuls + 100) < millis()) { digitalWrite(6, HIGH); int dly = Output * 1; //limit Power if (dly > 1000) { dly = 1000; } else if (dly < 0) { dly = 0; } //Serial.println(dly); delay(dly); digitalWrite(6, LOW); lastPuls = millis(); } } void getTemp(){ // Read the temp from the MAX6675 float loop_temperature[2]; for (int ii=0; ii<2; ii++) { loop_temperature[ii] = temp.read_temp(); if (loop_temperature[ii] < 0) { TCError = 1; } delay(50); } tempVal = (int)((loop_temperature[0] + loop_temperature[1] ) / 2 + 0.5); } void updateTemp( boolean force = false, int lastPosX = -1, int lastPosY = -1 ){ if (((millis() > (lastTempDisp + 1000)) && ( tempVal != lastDispTemp)) || (force == true)) { lcd.setCursor(0, 3); lcd.print("T: "); lcd.setCursor(3, 3); lcd.print(tempVal); lcd.print((char)223); lcd.print("C "); lastTempDisp = millis(); lastDispTemp = tempVal; if ((lastPosX != -1) || (lastPosY != -1)) { lcd.setCursor(lastPosX, lastPosY); } } } void fillNumber3(int number, String &dest3){ if (number < -9) { dest3 += String(number); } else if (number < 0) { dest3 = "0"; dest3 += String(number); } else if (number < 10) { dest3 = "00"; dest3 += String(number); } else if (number < 100) { dest3 = "0"; dest3 += String(number); } else { dest3 = String(number); } } void fillNumber2(int number, String &dest2){ if (number < 10) { dest2 = "0"; dest2 += String(number); } else { dest2 = String(number); } } void printProgLine(byte number, String &line){ line = (String)(number); line += ": "; line += (String)(progTSp[number]); line += ", "; line += (String)(progSprr[number]); line += ", "; line += (String)(progTime[number]); line += " "; } void printProcessLine(String &line){ String saSP; fillNumber3( aTsp, saSP); String st; fillNumber3( minutesPast , st); line = "TaSp: "; line += saSP; line += (char)223; line += "C "; line += " t: "; line += st; } void printSingleLine(String &line){ String sTsp; String sSprr; fillNumber3(Tsp, sTsp); fillNumber2(Sprr, sSprr); line = "Tsp: "; line += sTsp; line += (char)223; line += "C "; line += "Rp: "; line += sSprr; line += (char)223; line += "/m"; } //Update display void displayState(){ if (progState==0) { display0(); } if (progState==1) { display1(); } if (progState==2) { display2(); } if (progState==4) { display4(); } } void display0(){ if (lastProgState != 0){ cPosX = -1; cPosY = -1; lcd.noBlink(); lcd.clear (); // go home lcd.print("Program"); // program ended lastProgState = 0; lastSubProgState = -1; //Reset updateTemp(true); //Update Temperature } //Update every second if ((subProgState == 0) && (millis() > (lastDisp + 1000)) && (dispOn == 0)) { lcd.setCursor(0, 1); // go to the 2nd line lcd.print("-"); lastDisp = millis(); dispOn = 1; } else if ((subProgState == 0) && (millis() > (lastDisp + 1000))){ lcd.setCursor ( 0, 1 ); // go to the 2nd line lcd.print(emptyString); lastDisp = millis(); dispOn = 0; } else if ((subProgState == 1) && (lastSubProgState != 1)){ lcd.setCursor(0, 1); lcd.print("Setpoint"); lastSubProgState = 1; updateTemp(true); } else if ((subProgState == 2) && (lastSubProgState != 2)){ lcd.setCursor(0, 1); lcd.print("SDCard "); lastSubProgState = 2; updateTemp(true); } updateTemp(); } //Manual setpoint void display1(){ if (lastProgState != 1){ cPosX = -1; cPosY = -1; lcd.noBlink(); lcd.clear (); // go home lcd.print("Setpoint"); lcd.setCursor(0, 1); String line; printSingleLine(line); lcd.print(line); lastProgState = 1; lastSubProgState = -1; updateTemp(true); } //0. Back if ((subProgState == 0) && (lastSubProgState != 0)) { lcd.noBlink(); lcd.setCursor(0, 2); lcd.print("Back "); } //1. Set Temp if ((subProgState == 1) && (lastSubProgState != 1)) { lcd.noBlink(); lcd.setCursor(0, 1); String line; printSingleLine(line); lcd.print(line); lcd.setCursor(0, 2); lcd.print("TSp "); lastSubProgState = 1; } //2. Set Ramp if ((subProgState == 2) && (lastSubProgState != 2)) { lcd.noBlink(); lcd.setCursor(0, 1); String line; printSingleLine(line); lcd.print(line); lcd.setCursor(0, 2); lcd.print("Rp "); lastSubProgState = 2; } //3. Start if ((subProgState == 3) && (lastSubProgState != 3)) { lcd.noBlink(); lcd.setCursor(0, 2); lcd.print("Start"); lastSubProgState = 3; } //4. Change T 1. Digit if ((subProgState == 11) && (lastSubProgState != 11)) { //1. Digit cPosX = 1, cPosY = 1 cPosX = 5; cPosY = 1; lcd.blink(); resetRotState(Tdig1); lcd.setCursor(cPosX, cPosY); lcd.print(Tdig1); lcd.setCursor(cPosX, cPosY); lastSubProgState = 11; } else if (subProgState == 11) { lcd.setCursor(cPosX, cPosY); Tdig1 = rotationNumber; lcd.print(Tdig1); lcd.setCursor(cPosX, cPosY); } //5. Change T 2. Digit if ((subProgState == 12) && (lastSubProgState != 12)) { //2. Digit cPosX = 6, cPosY = 1 cPosX = 6; cPosY = 1; lcd.blink(); resetRotState(Tdig2); lcd.setCursor(cPosX, cPosY); lcd.print(Tdig2); lcd.setCursor(cPosX, cPosY); lastSubProgState = 12; } else if (subProgState == 12) { lcd.setCursor(cPosX, cPosY); Tdig2 = rotationNumber; lcd.print(Tdig2); lcd.setCursor(cPosX, cPosY); } //6. Change T 3. Digit if ((subProgState == 13) && (lastSubProgState != 13)) { //3. Digit cPosX = 7, cPosY = 1 cPosX = 7; cPosY = 1; lcd.blink(); resetRotState(Tdig3); lcd.setCursor(cPosX, cPosY); lcd.print(Tdig3); lcd.setCursor(cPosX, cPosY); lastSubProgState = 13; } else if (subProgState == 13) { lcd.setCursor(cPosX, cPosY); Tdig3 = rotationNumber; lcd.print(Tdig3); lcd.setCursor(cPosX, cPosY); } //4. Change Ramp 1. Digit if ((subProgState == 21) && (lastSubProgState != 21)) { //1. Digit cPosX = 15, cPosY = 1 cPosX = 15; cPosY = 1; lcd.blink(); resetRotState(Rdig1); lcd.setCursor(cPosX, cPosY); lcd.print(Rdig1); lcd.setCursor(cPosX, cPosY); lastSubProgState = 21; } else if (subProgState == 21) { lcd.setCursor(cPosX, cPosY); Rdig1 = rotationNumber; lcd.print(Rdig1); lcd.setCursor(cPosX, cPosY); } //5. Change Ramp 2. Digit if ((subProgState == 22) && (lastSubProgState != 22)) { //2. Digit cPosX = 16, cPosY = 1 cPosX = 16; cPosY = 1; lcd.blink(); resetRotState(Rdig2); lcd.setCursor(cPosX, cPosY); lcd.print(Rdig2); lcd.setCursor(cPosX, cPosY); lastSubProgState = 22; } else if (subProgState == 22) { lcd.setCursor(cPosX, cPosY); Rdig2 = rotationNumber; lcd.print(Rdig2); lcd.setCursor(cPosX, cPosY); } updateTemp(false, cPosX, cPosY); } void display2(){ if (lastProgState != 2){ lcd.noBlink(); lcd.clear (); // go home lcd.print("SDCard"); lcd.setCursor(0, 1); if (SDOpen != true) { if (! SD.begin(10)) { stopProgram(); return; } } SDOpen = true; progCount = 0; for (int ii = 1; ii < 10; ii++){ String fname = String(ii); fname += ".txt"; char fnamec[6]; fname.toCharArray(fnamec, 6); File myFile = SD.open(fnamec, FILE_READ); if (myFile) { progCount++; } myFile.close(); } if (progCount == 0) { stopProgram(); return; } lastProgState = 2; subProgState = 1; lastSubProgState = -1; updateTemp(true); } if ((subProgState < 10) && (lastSubProgState != subProgState)) { String fname = String(subProgState); fname += ".txt"; char fnamec[6]; fname.toCharArray(fnamec, 6); File myFile = SD.open(fnamec, FILE_READ); if (! myFile) { stopProgram(); } byte line = 0; byte Slength = 0; char tempString[1]; String HeadLine = ""; String ProgLine = ""; for (byte ii=0; ii < 10; ii++) { progTSp[ii] = 0; progSprr[ii] = 0; progTime[ii] = 0; } while (myFile.available()) { tempString[1] = myFile.read(); if (tempString[1] == '\r' ) { } else if (tempString[1] != '\n' ) { ProgLine += tempString[1]; Slength++; } else { if (line == 0) { HeadLine = ProgLine; ProgLine = ""; Slength = 0; line++; } else { if ((line > 10) || (Slength > 20) ) { stopProgram(); return; } char* accum; char buffer[Slength+1]; ProgLine.toCharArray(buffer, Slength+1); const char sep[] = ","; progTSp[line-1] = atoi(strtok_r(buffer, sep, &accum)); if (progTSp[line-1] > MaxT) { progTSp[line-1] = MaxT; } progSprr[line-1] = atoi(strtok_r(NULL, sep, &accum)); if (progSprr[line-1] > MaxR) { progSprr[line-1] = MaxR; }; if (progSprr[line-1] < 1) { progSprr[line-1] = 1; } progTime[line-1] = atoi(strtok_r(NULL, sep, &accum)); progLnCount = line - 1; //0-Anzahl-1 Slength = 0; line++; ProgLine = ""; // } } } myFile.close(); lcd.setCursor(0, 1); lcd.print(emptyString); lcd.setCursor(0, 1); lcd.print(HeadLine); printProgLine(0, ProgLine); lcd.setCursor(0, 2); lcd.print(emptyString); lcd.setCursor(0, 2); lcd.print(ProgLine); resetRotState(0); lastSubProgState = subProgState; } updateTemp(); } void display4(){ if ((lastDispPrg + 1000) > millis()) { return; } if (lastProgState != 4) { lcd.noBlink(); lcd.clear (); updateTemp(true); lastProgState = 4; } if ( progRun == 0 ) { lcd.setCursor(0, 0); String line; printProcessLine(line); lcd.print(line); lcd.setCursor(0, 1); printSingleLine(line); lcd.print(line); } if ( progRun > 0 ) { lcd.setCursor(0, 0); String line; printProcessLine(line); lcd.print(line); lcd.setCursor(0, 1); printProgLine(runLine, line); lcd.print(line); if (runLine != progLnCount) { lcd.setCursor(0, 2); printProgLine(runLine+1, line); lcd.print(line); } else { lcd.setCursor(0, 2); lcd.print(emptyString); } } updateTemp(); } void updateLog(){ if (SDOpen != true) { if (! SD.begin(10)) { return; } } SDOpen = true; File myFile = SD.open("T.log", FILE_WRITE); if (! myFile) { return; } myFile.print(millis() - logTime); // myFile.print(", "); // myFile.print(aTsp); myFile.print(", "); myFile.println(tempVal); myFile.close(); } Como veis en la foto, para probar primero (y no optimizado) son resultados muy agradables. Una manera realmente ingeniosa para mejorar el sistema aún más sería implementar una biblioteca autotunig (p. ej. desde aquí), pero se necesitaría más espacio que lo que está disponible en el atmega328. Una otra optimización sería utilizar un controlador de termopar más preciso.











")

