Paso 1: Instalación y configuración
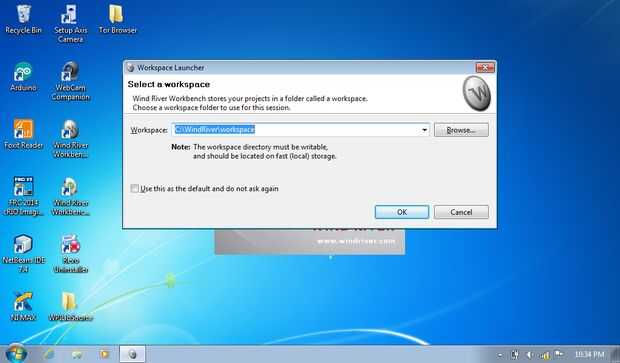
Para empezar, tienes que instalar Eclipse en el equipo de su elección. Eclipse es un IDE popular hecho por Oracle. Para instalar esto, vaya a https://www.eclipse.org/downloads/y encontrar la descarga etiquetada Eclipse IDE para desarrolladores de C y C++. Después de pasar por el proceso de instalación, luego tienes que instalar el roboRIO FRC Toolchain que puede descargarse por ir a http://first.wpi.edu/FRC/roborio/toolchains/ y seleccionar el enlace para su sistema operativo. No notará ningún nuevo aplicaciones instaladas después de instalar el toolchain. Ahora abrir Eclipse. Se encontrará con una ventana emergente preguntando qué espacio de trabajo que desea utilizar. Sugiero crear una carpeta en tus documentos llamado algo así como "FRCWorkspace". Se trata de la ubicación de sus archivos de código fuente junto con varios otros archivos como archivos y archivos de configuración.
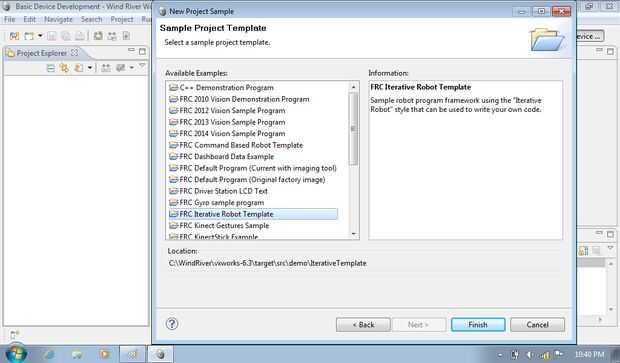
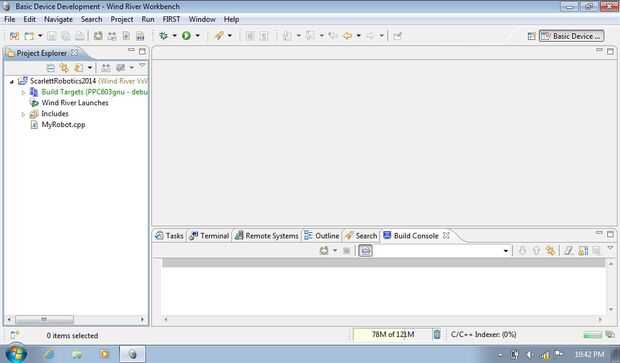
Si desea ver o utilizar los programas de ejemplo proporcionados por primera, archivo > Nueva > ejemplo... > VxWorks para descargar Kernel módulo proyecto de muestra. Se debe entonces presentará una lista de proyectos que se han escrito para usted. Haga clic en una de las opciones revelará más información sobre lo que contiene. Incluso si usted quiere programar todo desde cero, todavía debe comenzar su proyecto utilizando uno de estos ejemplos ya que configuración todos los incluye, construir configuraciones, banderas, etc.. Para los efectos de este tutorial, eligió IterativeTemplate. Para empezar tienes que limpiar un poco su proyecto. En el explorador del proyecto, clic derecho sample.txt y seleccione Borrar, luego presione OK. Luego IterativeTemplate con el botón derecho y seleccione Cambiar nombre. Cambiar el nombre de su proyecto para lo que quieras. Evite utilizar espacios o caracteres especiales que no sea un guión o un guión bajo. Te sugiero que hagas algo como 'TeamName2014'. Pulsar OK cuando se haya decidido por un nombre y ha escrito en el campo de texto proporcionado. La ventana puede parecer un poco desordenada ahora con cajas a lo largo de todo el espacio. No dude en arrastrar y soltar varias pestañas donde quieras. Por lo general desea un montón de espacio para tu editor de archivos en el medio y un explorador de proyecto visible en todo momento.




")



")




