Paso 5: IO Industrial Control
Ahora para este paso necesitamos las piezas como se indica en el paso 1.
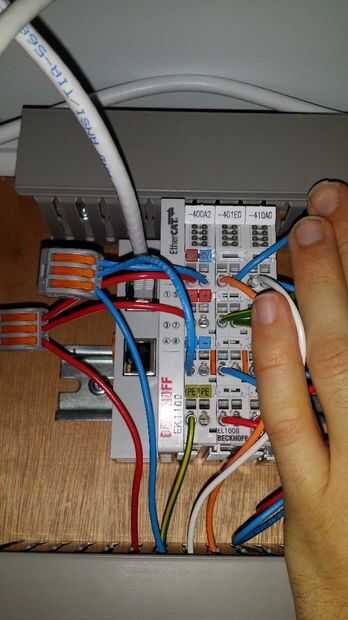
El sistema de cableado:
-Deslice los módulos industriales juntos. (ver imagen)
-Conecte el módulo industrial de IO a la fuente de alimentación de 24V. (ver imagen) (Todos los cables que mantengo la manera sólo son bucle las salidas digitales a las entradas digitales para las pruebas)
-Encienda el IO.
También necesitamos conectar el Pi ligeramente diferente. Debe conectarse la IP de tu conexión de red a través de su adaptador de USB a Ethernet. Desnudo en cuenta esto probablemente nos dará una dirección IP diferente a la anterior y aparecerá junto al dispositivo "eth1" Pi al usar el comando "ifconfig".
-Conectar la IP a su red a través del adaptador con un cable Ethernet.
-Conecte el IO (usando el puerto superior) al puerto de Ethernet de la Pi con el otro cable de Ethernet.
-El poder en el Pi.
Podemos conectar el IO, ahora necesitaremos para asegurarse de que tienes los archivos XML de descripción de dispositivo del fabricante industrial de IO y estos se agregan a CODESYS.
-Si usas Beckhoff los archivos XML pueden encontrarse aquí:
http://www.Beckhoff.co.uk/English.asp?download/ELC...
-Descargar y descomprimir el archivo zip en algún lugar seguro.
-Apertura de CODESYS, la barra de herramientas, seleccione Herramientas > repositorio de dispositivo...
-Haga clic en "Instalar..."
-Vaya a la carpeta te sólo descomprimido y seleccione el código XML del archivo "EKxxxx" y haga clic en abrir, CODESYS instalará automáticamente el dispositivo.
-Repetir los 2 pasos anteriores para todos los demás dispositivos que trajo, en mi caso para EL1008 y EL2008 instalar "EL1xxx" y "EL2xxx".
Ahora para conectar a la IO industrial mediante CODESYS:
-Iniciar un nuevo proyecto en CODESYS y conectar con el Pi la misma forma que se muestra en el paso 3.
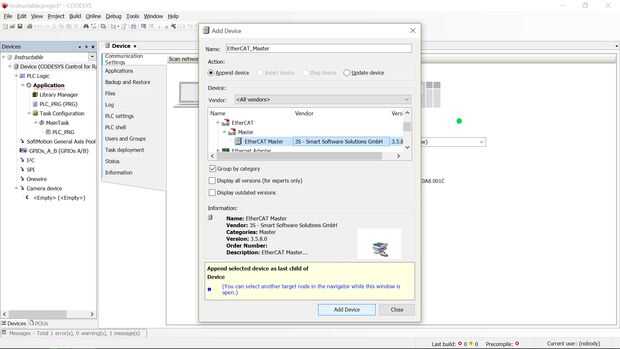
-Haga clic derecho en "Dispositivo" en el árbol de dispositivos y seleccione "Agregar dispositivo...".
-Desde la nueva ventana (ver foto) Seleccione "Amo de EtherCAT de" y haga clic en "Agregar dispositivo".
-Cerrar la ventana.
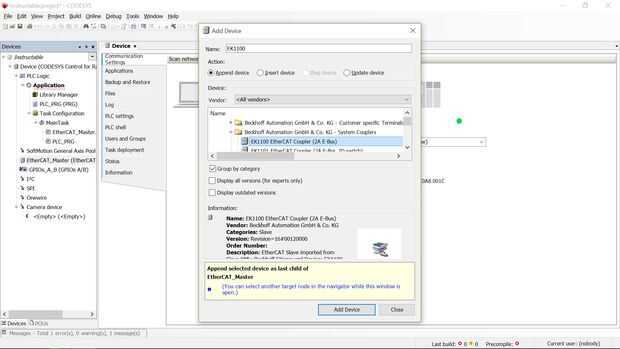
-Haga clic derecho sobre "EtherCat_Master" en el árbol de dispositivos y seleccione "Agregar dispositivo...".
-Seleccione "EK1100" de EtherCat > esclavo > acopladores de sistema de automatización de Beckhoff y haga clic en "Agregar dispositivo...".
-Cerrar la ventana.
-Haga clic derecho sobre "EK1100" en el árbol de dispositivos y seleccione "Agregar dispositivo...".
-Seleccionar el primero de sus módulos, en mi caso el "EL1008" de EtherCat > esclavo > terminales de entrada Digital de Beckhoff Automation y haga clic en "Agregar dispositivo...".
-Repita el paso anterior para todas IO adicional en orden de cómo están conectados para el acoplador del sistema.
Hay una función que se puede utilizar para agregar automáticamente todos IO pero no lo cubre que en este instructable que es bueno entender cómo CODESYS acumula el IO.
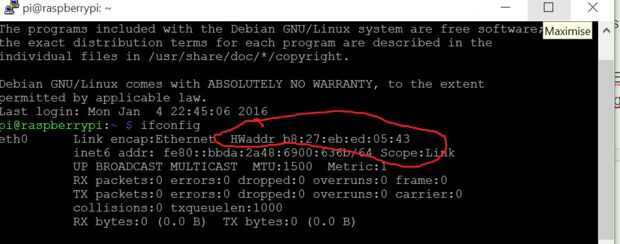
Ahora necesitamos encontrar la dirección hardware (MAC) de puerto de Ethernet de la Pi a CODESYS dónde buscar el IO, para ello Conecte el pi en un monitor o SSH y utilizar el comando "ifconfig" en el terminal. Busca el código al lado de HWaddr desde el puerto eth0 (ver imagen).
Una vez que tengas la dirección que tenemos que añadir a CODESYS:
-Desde el árbol de dispositivos, haga doble clic en "EtherCAT_Master".
-Introduzca la dirección de hardware de antes en el campo de entrada de texto "dirección de la fuente (MAC)".
Todo el hardware está ahora configurado y ahora estamos listos para crear nuestro primer programa para el control de la IO industrial.
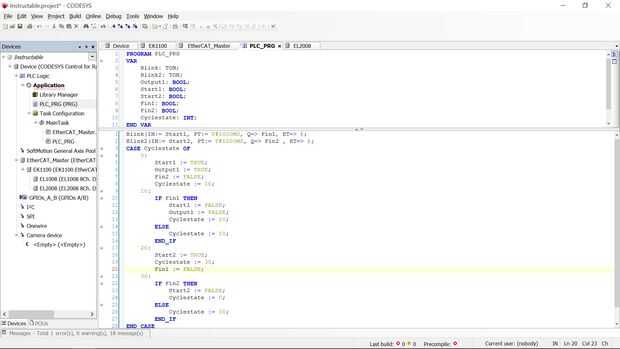
-Haga doble clic en "PLC_PRG (PRG)" en el árbol del dispositivo.
-Ahora copia el texto de mi captura de pantalla (he adjuntado documento .txt para hacerlo más fácil) en el windows correcto, observando la ventana superior es declarar las variables y la parte inferior es para el código. Este es esencialmente un parpadeo rutina basada en dos temporizadores a la salida 1 a parpadear LED desde el IO de Beckhoff.
Ahora tenemos que enlazar nuestra Variable "Output1" a nuestro IO de Beckhoff, hacer esto:
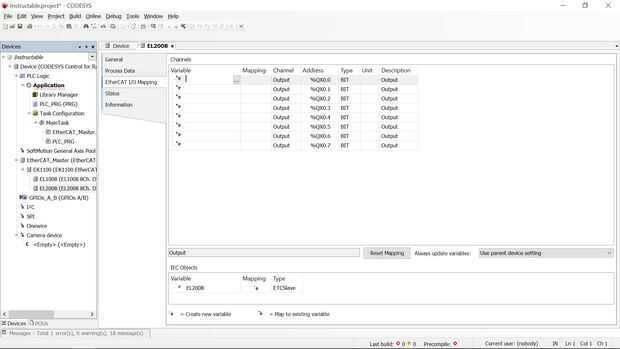
-Haga doble clic en "EL2008" en el árbol del dispositivo.
-Ir a la pestaña de "Mapeo de I/O EtherCAT".
-Haga doble clic en el primer cuadro de la variable. (ver imagen)
-Haga clic en el "..." que ha aparecido ahora en el cuadro. (ver imagen)
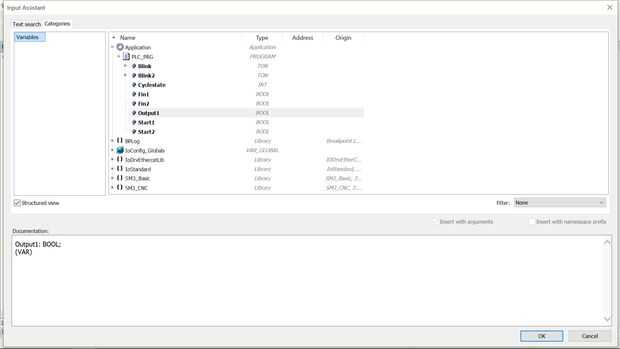
-Ahora tenemos que seleccionar la variable Salida1, encontrar esto siga aplicación > PLC_PRG luego haga doble clic en "Output1". Esa salida está ahora asignada a esa variable.
Para ejecutar el programa:
-Presione "F11" en su teclado, esto construye/compila el código. También encuentra en "Construir" en la barra de herramientas.
-Una vez que se compila el código, pulse "Alt + F8" para entrar en el Pi (o el PLC ahora le dan su nombre correcto). También encontrar "Online" en la barra de herramientas.
-Haga clic en "Sí" en el pop hasta descargar el programa.
-Una vez que había descargado el programa, presione "F5" para ejecutar el programa. También encontrar "Debug" en la barra de herramientas.
Ahora debería ver la salida 1 del LED en un abrir y cerrar Beckhoff Terminal a intervalos de 1 segundo. Para ver el código de trabajo, doble clic sobre "PLC_PRG" desde el árbol de dispositivos y usted debería ver un feed en vivo de la situación de las variables.
Para detener el código pulsar "Shift + F8" en su teclado. También encontrar "Debug" en la barra de herramientas.
Enlazan a entradas de EL1008 funciona de la misma manera. Probar el cableado de la salida 1 en la entrada 1 y agregar una variable para ver la variable también cambiar entre falso y verdadero.
Usted puede ahora grado Industrial control IO con una frambuesa Pi, pensar en las posibilidades.
Algunos ejemplos podrían incluir con entradas analógicas para supervisar diferentes sensores, salidas PWM para control de motores etc..
Si usted encuentra cualquier problema, he añadido mi archivo de programa Codesys para el Instructable para comparación.











")

