Paso 4: El circuito
Motores servos se utilizará para conducir las juntas, conectadas directamente con el Arduino. Tenga en cuenta que no es raro ver "Motores paso a paso" usado en la base de precisión y mayor par motor. La opción apropiada de servos son muy importantes (hay servos chinos baratos que están muy mal construidas como MG995, que lamentablemente son los que vinieron con mi abrazo de 3DOF SanSmart). Pero para el propósito de este proyecto funciona bien.
La alimentación de CC para los servos debe estar separada de la Arduino y otros componentes. Una fuente de alimentación externa de 5 o 6V debería funcionar sin problemas (ver la hoja de datos de sus servidores para verificar el rango de voltaje adecuado). Una práctica común también está utilizando condensadores de 470uF entre VCC y GND para minimizar el ruido generado por los motores de CC dentro de los servidores. Asegúrese de conectar todos los "motivos" (fuente de alimentación externa con los pines de Arduino GND).
Si los servos tienen problemas y vibran mucho, realizar los ajustes en los "retrasos" de su código. Es importante que los servos tengan tiempo para llegar a un cierto punto antes de recibir un nuevo comando. También vale la pena comprobar si los servos son digitales o analógicos, que son mecánicamente similares, las obras digitales con una frecuencia de 300Hz mientras que la analógica, 50Hz. La biblioteca estándar de Arduino "Servo.h" fue desarrollada para servos analógicos y puede ser modificada si es necesario, para un mejor funcionamiento con servos digitales.
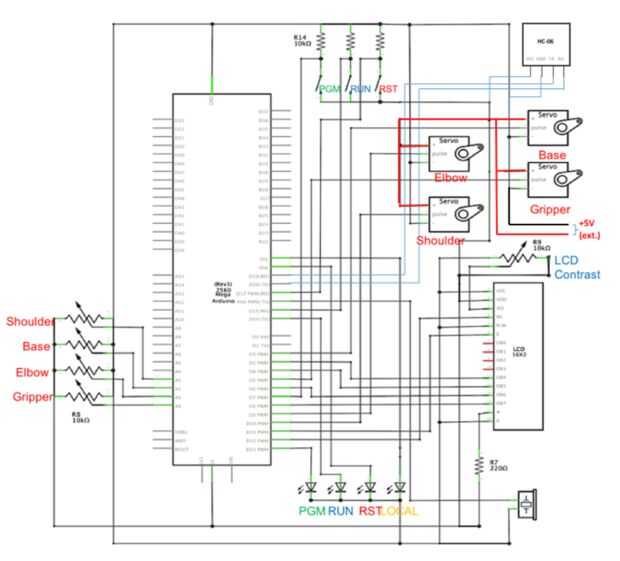
El dibujo muestra el circuito completo













