Paso 5: Clasificación de rampa
![]()
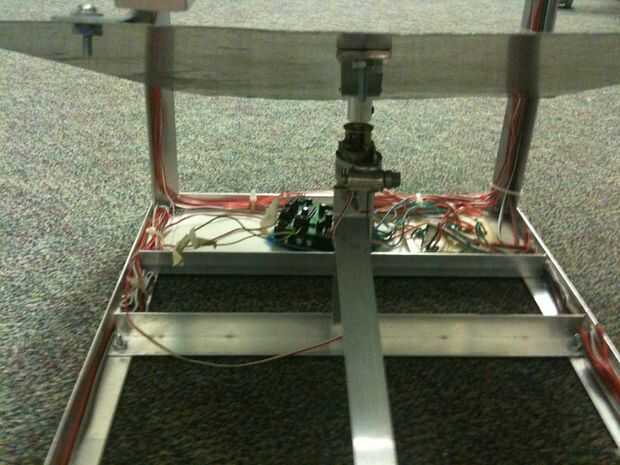
Por debajo de la segunda zona de pruebas, se construye una rampa para ordenar la bottle/can. Cada lado de la máquina representa una de las botellas/latas y una bandeja se coloca en cada lado para recoger cada bottle/can. Cuando Arduino identifica qué material es la bottle/can, la rampa girará hacia el lado que representa ese material. Un motor se une a la parte inferior de la rampa para que se prenda. El Arduino funcionará el motor para un número determinado de segundos para girar a la derecha punto. Puesto que este método no es muy preciso, la rampa eventualmente empezará a parar en lugares que no debe. Para evitar que esto suceda, la rampa tendrá una posición de salida que devolverá a cada vez que un bottle/can se ordena. Se colocó un tapón en este lugar por lo que cuando la rampa se iniciará siempre en la misma posición.
Para conseguir la botella/puede a la rampa, la placa inferior (placa azul) en la segunda área de prueba es realmente una puerta trampa. Cuando la rampa esté en la posición correcta, un motor gire la puerta de la trampa fuera del camino, causando la botella/puede caer y golpeó la rampa, desviando al lado correcto de la máquina y en su cubo.
Cuando la botella cae en su cajón, la trampilla se cierra, la rampa que vuelve a la posición inicial y la máquina se inicia por el funcionamiento del transportador.


")


")
")
")



![3D impreso Sumobot [autónoma RC, Multiplayer Bluetooth]](https://foto.askix.com/thumb/170x110/c/58/c58e3803baa24b310292be19feb85290.jpg "3D impreso Sumobot [autónoma RC, Multiplayer Bluetooth]")
")
