
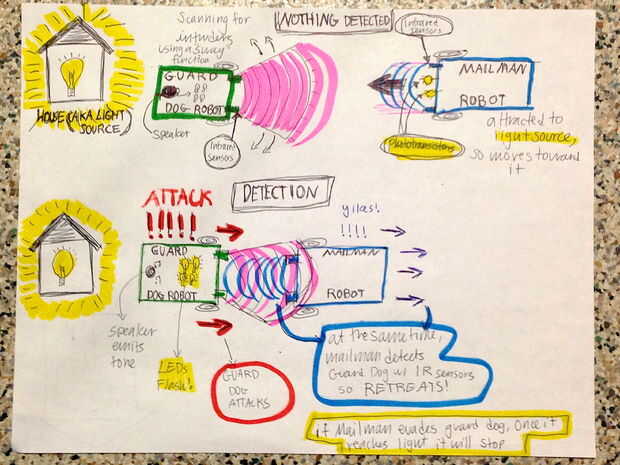
El objetivo de este proyecto es programar dos robots para interactuar con éxito con los demás, actuando hacia fuera de un escenario de mailman de perro de guardia. El escenario es que el robot perro guardián protege su casa (también conocido como fuente de luz) de todo lo que viene dentro de su gama. Si se detecta un intruso, como el cartero, se alarma y atacar al intruso hasta que se siente como si la zona es segura otra vez. Al mismo tiempo, el robot de Mailman actúa como el intruso cuyo principal objetivo es llegar a la fuente de luz de casa sin ser atacado por el perro de guardia.
Cada vez que el perro de guardia viene cerca de él, el cartero se retira, haciendo que el perro de guardia reanudar su patrulla. En nuestros laboratorios anteriores, vimos cómo los robots equipados con sensores podrían interactuar con y ajuste con el mundo exterior. Esto era especialmente cierto en el laboratorio de vehículos de Braitenberg donde robots equipados con fototransistores interactuaban con la luz y también en los laboratorios de laberinto donde robots navegaron sus manera últimos obstáculos mediante sensores infrarrojos. Con estos conceptos en mente, comenzamos este proyecto con el objetivo de la programación de que los robots no sólo interactúan con los demás, pero también interactuar con el mundo que les rodea. Pensamos que un escenario como éste era interesante porque si refinados y más integrales, podría permitir a robots ser utilizado como perros de guardia robótica real - posiblemente juntados con diseño de perro grande de Boston Dynamics.
Para resolver este problema, primero tenemos que crear circuitos de infrarrojo y fototransistor para nuestro para nuestros robots. El perro de guardia sólo utilizará el circuito infrarrojo pero también requiere la capacidad de alertar a otros de sus detecciones mediante el uso de LED y altavoces piezoeléctricos, que requieren circuitos de estos. El cartero se establecerá del mismo modo con los sensores infrarrojos pero requerirá fototransistores para detectar la fuente de luz. Este proyecto requiere nuestros robots para detectar constantemente sus entornos y entonces reaccionar a los cambios sucediendo alrededor de ellos. Las reacciones serán primero en forma de sonido y luz, seguido de reacciones en forma de movimiento. Vamos a utilizar si, si otra cosa y otra declaraciones, luz y código de detección de infrarrojos y funciones que se crean para realizar tareas específicas - tales como guardia perro funciones a patrullar el perímetro o atacar al cartero cuando detecta. Estaremos observando que cada robot reacciona a sus respectivos ambientes - con y sin el uno al otro, y cómo cada robot reacciona al otro reacciona a él. Esto se registra fácilmente mediante la observación y nota que, desde el que fácilmente se muestran resultados en nuestro informe.













