

Este tutorial incluye toda la información necesaria para la construcción, arquitectura electrónica y paquetes de software para Protei_007, incluyendo los paquetes de código y plantillas de láser. Esto se puede construir en pocas horas. Herramientas requeridas incluyen un cortador láser.
PRINCIPALES gracias a SEEED STUDIO para apoyar la construcción del prototipo de proteinuria siguiente!
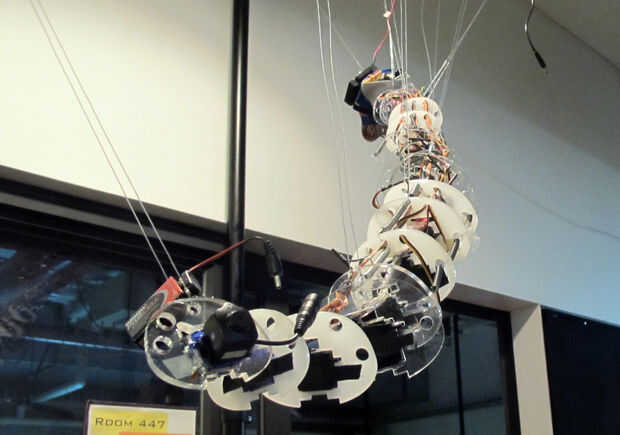
Este particular robot serpiente es el esqueleto de un robot articulado segmentado que puede ser había controlado con un joystick o cualquier tipo de entrada, así como la capacidad para moverse sus el propios con un movimiento ondulado se propaga por el cuerpo. Cada costilla (sección representativa horizontales plexiglás) se compone de 3/8" del plexiglás y se une a servomotores que actúan como la Junta, de ida y vuelta de rotación en un eje (de lado a lado). Esto hace que cada segmento independientemente cambia de forma, contrario a versiones anteriores de proteinuria. Cada segmento está conectado por ya sea un rígido soporte de metal común, o por un tubo de PVC más flexible. Esta versión actual es aproximadamente de 1,5 metros de largo, compuesta de 17 segmentos. Esto es algo arbitrario y no es necesario seguir con exactitud. Además, utilizo tres tamaños de servos, con los más grandes en el centro y los más pequeños en cada extremo, mímico la forma ahusada de una serpiente.
Ver video y documentación de Protei_006:
Aquí hay algunas fotos y documentación de Protei_007 en el ITP Winter Show 2011.
