Paso 3: Los componentes electrónicos de Babuino
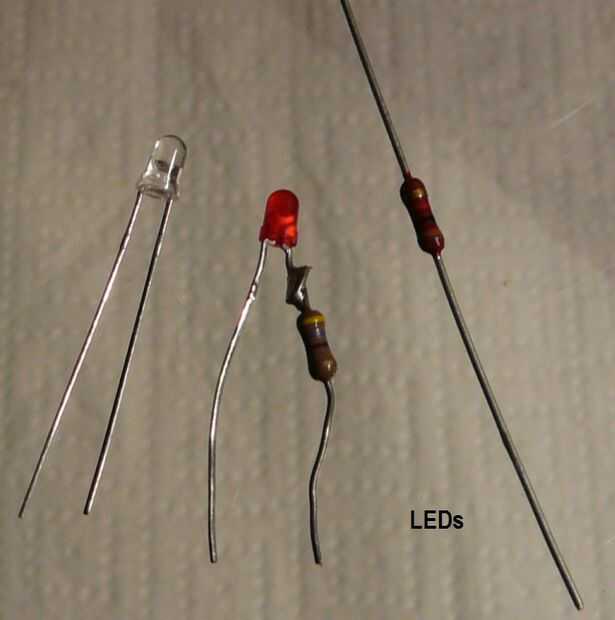
Vamos a empezar con algunas piezas simples primero. El cuadro con la etiqueta "LEDs" muestra un LED de la izquierda, una resistencia a la derecha y un LED con una resistencia soldada en una pierna en el medio. Para nuestros propósitos, un LED siempre debe tener una resistencia en serie con él. Es conveniente soldar la resistencia a una pierna (no importa cuál) como se muestra aquí. Esta manera, usted sólo puede introducir en su protoboard (idea original). La resistencia debe estar en el rango de 220 ohmios a ohmios de 1 K; el valor exacto no importa. Un nuevo LED generalmente tendrá una pierna más larga que la otra. La pierna más corta es la que va a tierra. Si usted está seguro de que manera se debe conectar el LED, es fácil de probar. Conectar la resistencia de tierra a una pierna. Tocar la otra pierna a un voltaje positivo alrededor de 5 voltios. Si el LED no enciende, cambie las conexiones de las dos piernas. Como tienes la resistencia en serie, el LED no dañado por las pruebas. Para construir el Babuino, puede elegir cualquier color de LED que te gusta.
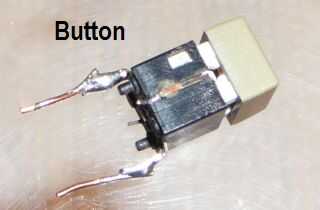
La imagen con la etiqueta "Botón" muestra un ejemplo de un botón que podemos utilizar. Es sólo un simple botón. Hay muchos botones convenientes para elegir, así que no hay uno específico se llama hacia fuera. Los botones que elija deben ser normalmente abierto y cierre cuando presiona. Escoge un tamaño que te gusta. Tenga en cuenta las longitudes cortas de 22 calibrador de alambre de cobre soldado a las conexiones para que sea fácil de conectar en el protoboard.
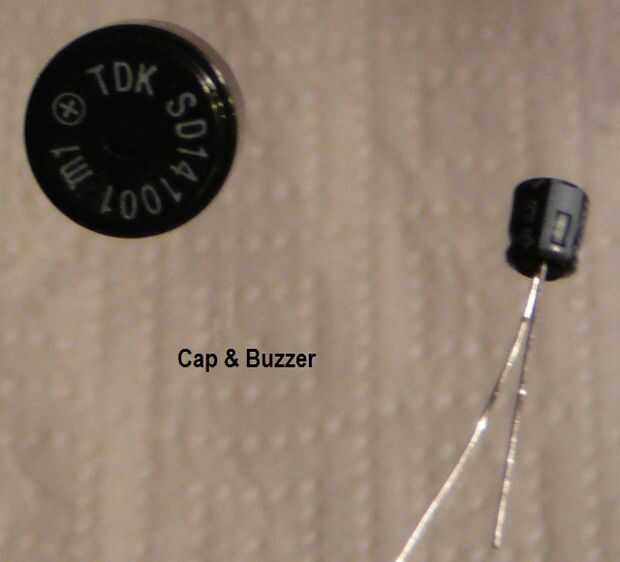
Moviéndose a lo largo, ver "Cap & zumbador" a ver, sí, que adivinaron, un condensador y el zumbador. El condensador que se muestra (a la izquierda) es uno de los dos condensadores grandes, electrolíticos que usaremos en el protoboard. Lo importante a destacar es que un lado de la tapa tendrá uno o más "-" firma en él. Esto significa que la pierna más cercana a esto "-" debe estar conectado a tierra. Esto es muy importante – no se equivocan! Los otros condensadores que usaremos son casquillos de cerámica pequeño y pueden ser enchufados en cualquier manera. El zumbador está incluido aquí porque preocupa de cómo está conectado. En este caso, un pequeño "+" denota la pierna que está no conectado a tierra. Una resistencia (120 a 200 ohmios) se debe colocar en serie con el buzzer.
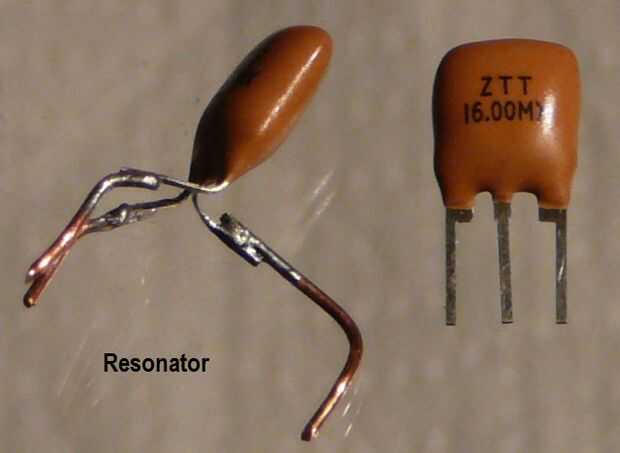
"Resonador" muestra dos de los resonadores de cerámica como vamos a usar (sólo se utiliza). Me gusta los Arduinos porque son más baratos y fáciles de usar que los cristales. El de la izquierda tiene longitudes cortas del alambre de cobre soldadas a las piernas para que sea fácil de conectar en el protoboard. El cable más largo va a la pata del centro y se conecta a tierra. Aunque el resonador no es tan preciso como un cristal, es mucho precisa para la generación de la tasa de baudios y tan bien cumple con nuestras necesidades.
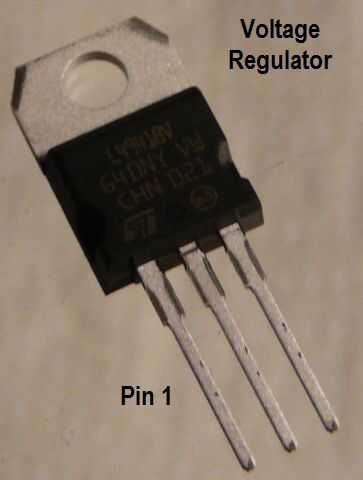
Tres circuitos integrados (ICs) se utilizan para la construcción de Babuino. ¿El primero es el regulador de voltaje (adivina qué imagen lo muestra? Derecho! ¿Cómo sabes?) La imagen muestra la vista frontal y muestra lo que pin es el pin 1. Pin 1 debe conectarse a la conexión positiva de las baterías, pin 2 está conectado a tierra y el pin 3 suministra 5 voltios como Vcc a otros ICs. Diagramas de conexión son proporcionadas, pero siempre debe comprobar las conexiones de todos modos. Tenga en cuenta que la lengüeta metálica grande en esta parte debe ser tratada como tierra. Tenga cuidado cuando se conecta los cables!
El dos ICs restantes son el microprocesador y el controlador del motor. Estos serán discutidos más abajo. Una cosa que debe saber sobre estas partes: el pin 1 es siempre en la esquina inferior izquierda cuando la IC es visto desde la parte superior. Para orientar correctamente el IC, busque una muesca o un circulo en un extremo. Es el pin 1 del final. En los esquemas a seguir, una barra blanca en el centro en un extremo de cada IC indica esta muesca.












 (impresión 3D)")
