Paso 4: Control de la pieza del brazo!
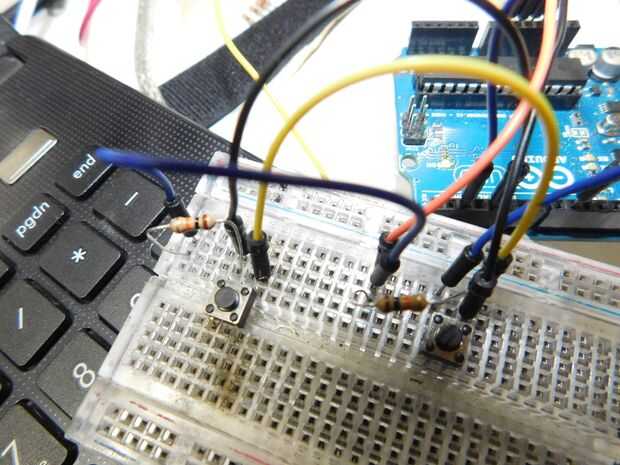
Usar un microcontrolador (estoy utilizando un arduino uno), para programar el servo para mover. Aquí es cómo construir el circuito paso a paso:
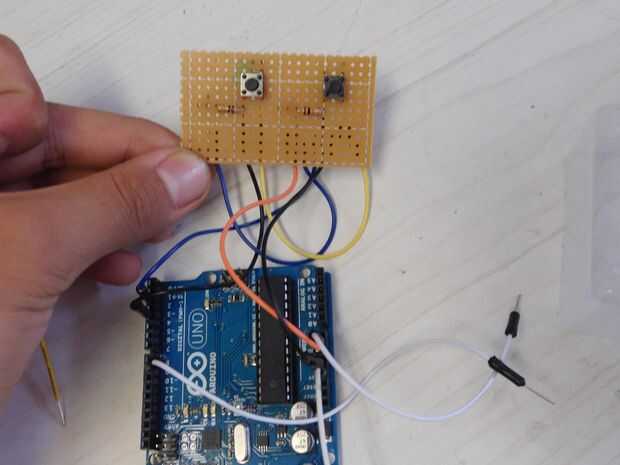
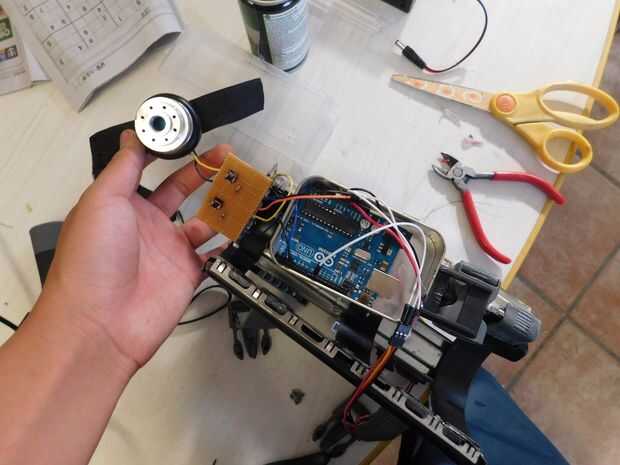
Después de probar las cosas en un protoboard, soldadura en perfboard. El repulsor de Palma es opcional, pero mina había hecha de un motor de disco duro del ordenador y había añadido el LED con una película azul cielo de la luz. Solía el patillas de 5 voltios y tierra de arduino potencia esto.













