Paso 12: Prueba los motores Rover
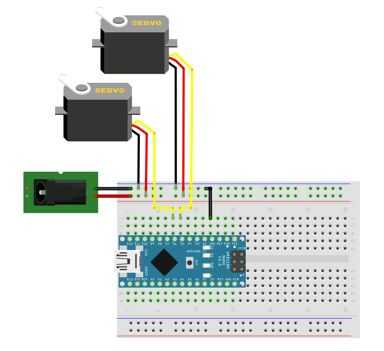

En este punto, el Rover comenzará a ser montado. Me decidí a desmontar todos los sensores y empezar desde cero la fase"Arduino". Una vez que el Rover estaba trabajando correctamente, la RPI y los sensores fueron reensamblados.
Para los motores servos continuadas 2 (SM-S4303R) fueron utilizados. Los servos se ejecutarán con una velocidad según el ancho de pulso recibido en la entrada de datos.
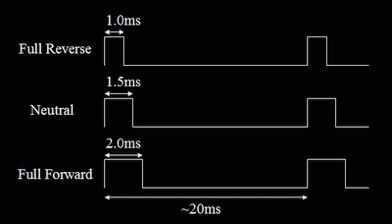
- Para este servo, el ancho de pulso va de 1.0ms a 2.0ms (otros servos pueden trabajar con ancho de pulso diferentes)
- Un pulso de 1.5ms colocará el servo en posición neutra, o "parado".
- Un pulso de 1.0ms mandará el servo a toda velocidad (unos 70 RPM) en una dirección y 2.0ms toda velocidad en la dirección opuesta.
- Del pulso entre 1.5ms, 1.0 y 2.0ms o 1.5ms, generará velocidad proporcional.
Lo primero que debe hacer, es enviar un 1500ms pulso para verificar si los motores se "paran". Si no, los servos deben ajustarse a parada completa (busque el perno amarillo, abajo el servo). Por supuesto si el servo no tiene este ajuste, valor de cambio "1500ms" probar hasta conseguir el punto.
#include Servo
leftServo;
Servo rightServo;
Void setup()
{
leftServo.attach(6);
rightServo.attach(5);
leftServo.writeMicroseconds(1500);
rightServo.writeMicroseconds(1500);
}
void loop()
{
}
El siguiente código, puede ser utilizado para una prueba completa del motor de Rover (adelante, atrás, Full stop, gire a la izquierda, gire a la derecha). Si es necesario se deben ajustar los retrasos para el ángulo requiere a su vez en función de sus motores (también, a veces a la izquierda y derecha pulso valores deben ser un poco diferente para compensar cualquier falta de equilibrio de los motores.













