Paso 15: Sensores para la evitación del obstáculo
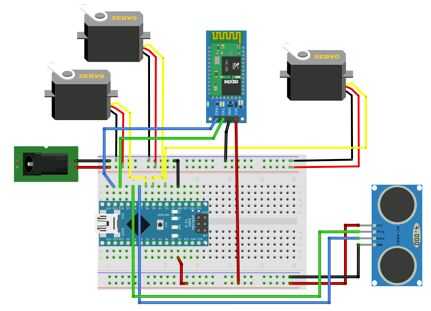
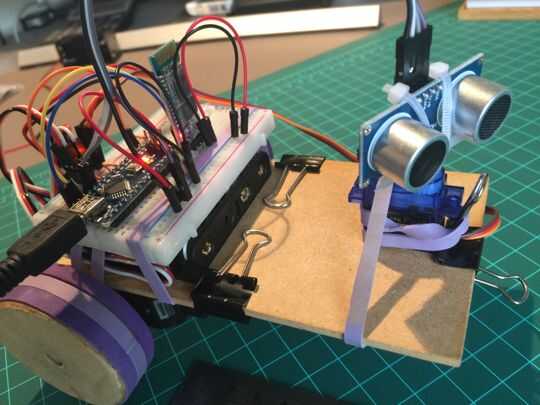
Para la evitación del obstáculo, se utilizará un sensor de ultrasonidos (HC-SR04). El sensor se montará sobre un servomotor de 180o, con el fin de aumentar el área que desea buscar. Tenga en cuenta que el servo se utilizará también como base para la cámara de Pi. Por lo tanto, el usuario puede tener una mayor visión del área a ser investigada. Un control deslizante en el Android app de control de ángulo de la cámara.
El sensor funciona enviando un pulso de sonido en el perno del gatillo (2us baja; 10us alto) y registre cuántos microsegundos la reflexión del pulso tarda en volver al pin Eco (Recuerde que el sonido viaja a 340m/s). La función "distMeter() int « se utiliza para este cálculo.
En el caso de un obstáculo se encuentra a 20cm (en frente), el rover stop, luz en el LED y correr hacia atrás unos pocos centímetros. El video muestra las pruebas con el Rover.
El Arduino completado de código (anterior + obstáculo evitación y la búsqueda de servo control) está disponible en los archivos:













