Paso 7: Pero... ¿Cómo controlamos la cosa?
Sin embargo, puedo decir que tratamos la voz a través de una serie de filtros, que permiten una FPGA reconocer, según el estado de cada salida que dan nuestros filtros, que fonema fue pronunciado por el operador.
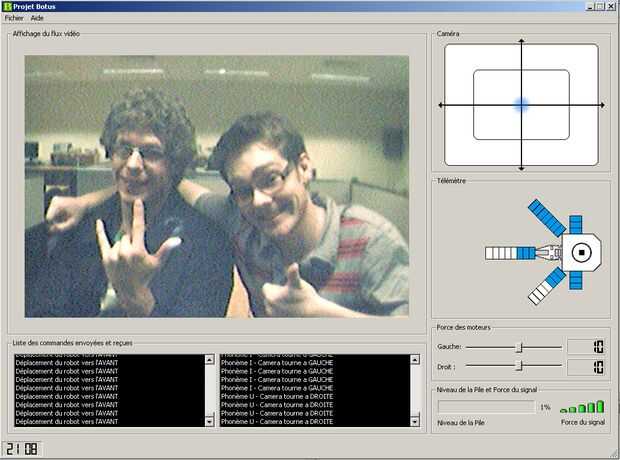
A partir de ese momento, nuestros estudiantes de ingeniería de computadora diseñaron una interfaz gráfica que muestra toda la información recogida por el robot, incluyendo video en vivo. (Este código no está incluido, por desgracia)
Estas informaciones se transmiten a través del módulo XBee en el 101 de Colibri, que luego son recibidos por otro módulo XBee, que luego pasa a través de un convertidor de Serial a USB (planes para esta tabla también se incluyen en el archivo .rar) y luego son recibidos por el programa.
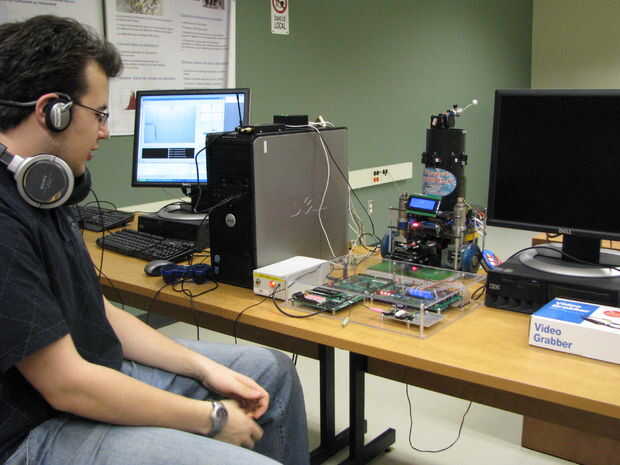
El operador utiliza un mando normal para transmitir los comandos de movimiento/pinza para el robot y un auricular para el control de la cámara.
Este es un ejemplo del robot en acción:













