Paso 4: Bolas de ojo

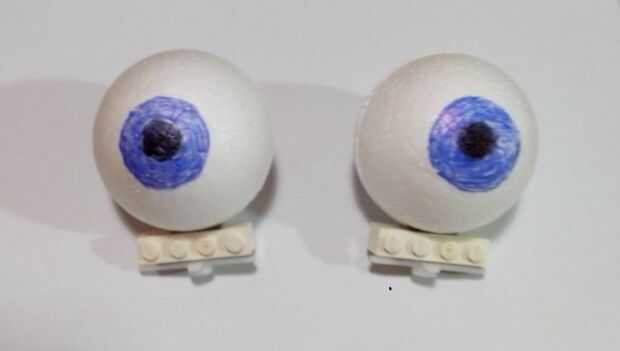



Las "bolas de ojo" están compuestas por dos bolas de poliestireno expandible (esferas de poliestireno) pintadas. Las bolas fueron pintadas con un rotulador, dibujando un pequeño círculo negro con un otro círculo azul fuera de éste primer.
Construcción: IntFirstly atamos un bloque de Lego (bloque pequeño de lego de 4 puntos) con una doble cinta adhesiva echada a un lado de la esfera;
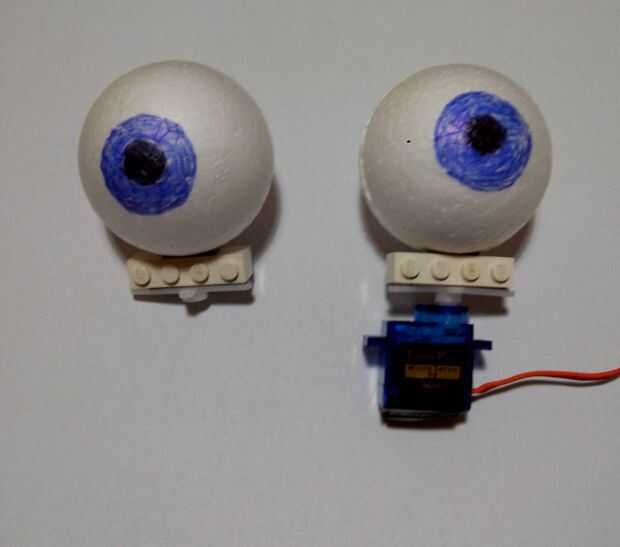
- Después de eso, nos une la tapa del servo montaje pieza a este bloque de Lego;
- Y, por último, atamos los servos a la pieza superior (generalmente proporcionada en los servos).
El servo adoptado fue una torre Pro 9g Micro Servos:
http://www.DFRobot.com/index.php?Route=Product/Pro...
(puede reemplazarse por cualquier otro motor de servo con 180 grados de rotación)
Servos tiene 3 cables: VCC (rojo), GND (negro o blanco), Control (naranja o marrón)
Se conectan los cables de VCC y GND a un protoboard pequeño y luego a la Edison, utilizando los pines de arduino corresponsal VCC(+5)/GND(Ground). El Servo Control cables fueron conectados juntos (señal pwm solo 1 se envía simultáneamente a ambos servos, ya que el ángulo es el mismo para ambos). Si desea que puede usar separado pwd controles de señal para cada bola del ojo.













