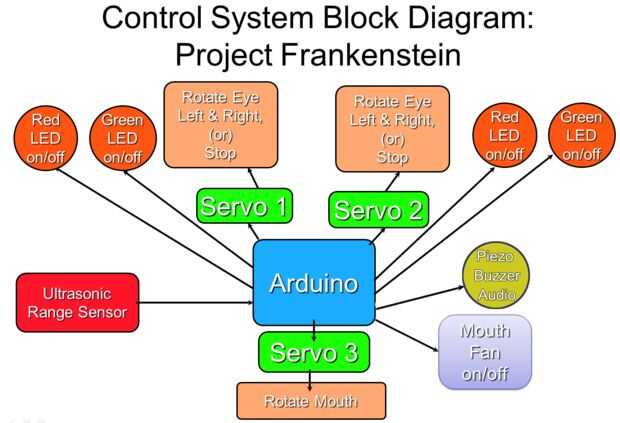
Paso 2: Diseño y esquema de circuito:
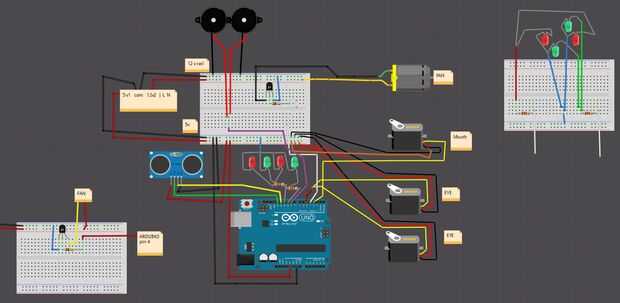
Conexión de los componentes y el microcontrolador Arduino fue facilitada usando un protoboard. La placa fue dividida en secciones de remolque. Uno de 5 voltios y un carril de 12 voltios. La AC a DC (doble salida 5 voltios 12 voltios 4 Amp 1 Amp 32 Watt) fuente de alimentación conectado en cada carril respectivo. Ambos comparten un terreno común. También hicieron una conexión tierra y 5v de la placa para Arduino.
Lado 5 voltios:
El sensor de la gama ultra conectado a la tierra y el carril positivo de la parte de 5v de la placa. El eco y el gatillo están conectados a los pines 12 y 13 del Arduino.
Los tres servos conectados 5v y carril positivo, y la señal a los pines 3 y 5. Los dos servos para los ojos compartan la conexión del pin 5 de Arduino.
Los LEDs verdes y rojo comparten un terreno común. Los LED rojos están conectados a un solo perno 11 como son los LED verdes al pin 10. Resistores se utilizan en la Junta de reduce los niveles de tensión. * Por favor refiérase a la imagen arriba-derecha.
Los zumbadores Piezo se conectan a la tierra de la placa y conectan los cables de puente a ambos a un solo perno (9).
12 voltios secundarios:
El ventilador está conectado con el carril positivo en el lado de 12 voltios. Otra conexión del ventilador va a la placa, luego a un transistor. Un resistor está conectado con el transistor y el Arduino al pin 4. El transistor está conectado también con el carril de tierra. * Consulte él por encima de la parte inferior de la imagen izquierda.





")







