Paso 2: Decidir sobre las piezas
Hay relativamente pocas piezas necesarias para ello, la mayor parte de se puede comprar por alrededor de $70 y dependiendo de lo que tienes en la mano esto puede ser menos, tal vez un poco más. Si no tienes nada en absoluto, todavía figura esto podría robaban para ~ $100.
Controlador
El controlador inalámbrico de Lynxmotion es fantástico, se siente agradable en la mano, se ve bien y su nuevo para que sepa que funciona. Realmente muy sugiero lo primero. También, supongo que esto no fue pensado y fue muy afortunado, pero los agujeros de montaje para el Roomba original (serie 500 la tengo de todos modos) línea del tablero para arriba perfectamente con los agujeros de montaje y son del mismo tamaño como los distanciadores suministrados con el controlador de Lynxmotion, haciéndolo muy fácil de montar el dongle inalámbrico.
Roomba
Si tu Roomba tiene una batería que funciona y un cargador, dude en utilizarlo. Tengo varias Roombas rotos (tableros de muertos) y las baterías nunca trabajan en ellos tampoco. El plomo sellada ácido obras cargadores bien con un cargador de coche y su nuevo, si no funciona volver. ACE no dispone de ellas en su página web, pero dispone de ellos, aunque "ajustar" el compartimiento de la batería es necesaria para que ajuste, pero es muy fácil hacerlo.
Todo lo demás
Ahora viene la diversión poco. Quería ejecutar los motores de 12v ya que requieren y todo lo demas apagado 5v, pero tiene 5v y ~ 3v pedacitos, hay por lo menos 2 maneras alrededor de esto; la manera correcta que es una fuente de ~3.3v y un desplazador de nivel bidireccional o mi forma de doblar las reglas con lo que tenia en mano y utilizando sólo un 5v suministro, un conector USB hembra y un hexagonal inversor capaz de Lógica CMOS y TTL. Una tercera manera sería Arduino que usa 5v ya.
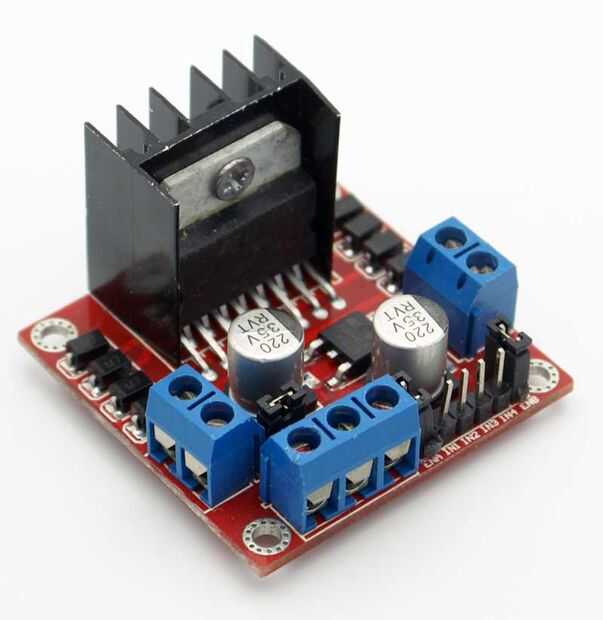
Usted también necesitará un controlador de motor y el L298 es una gran opción. Debe tenerse en cuenta que si utiliza un tablero L298 preconstruido, necesitará ajustar el código un poco como he asociado 2 sets de 2 entrada en el L298 juntos, así que usar solo 4 pines para controlarla algo entonces 6.
Los materiales;
- El controlador (altamente sugerir la Lynxmotion los inalámbricos de tienda Robot o similar)
- Una Roomba (eBay, buscarlos rotos, tengo la 3 500 serie unos, me gusta la 500 serie, que es la que voy a sugerir)
- Una batería porque realmente dudo usted conseguirá una Roomba roto con un funcionamiento normal, las baterías parecen ser bastante blando en cuanto a longevidad. (UB1213K, 12v, 1.3Ah)
- Descarga código compositor estudio de Texas Instrument y MSP430G2553
- L298N controlador dual de motor (Chip o placa. Una búsqueda en Google para L298 traerá para arriba una plétora de resultados)
- CD4069CN hexagonal inversor y una 14 o más pines zócalo DIP es útil
- Unos terminales de doble tornillo son útiles si utilizando el L298 solamente y no una tabla prefabricada
– 8 diodos 1N4004, o como alternativa 2 puentes rectificadores con propiedades similares como el diodo 1N4004 (usé 2 MDA200G y sí suena impar, pero cómo se enganchan para arriba puentes rectificadores y más ordenados en mi opinión)
– pernos de header macho de 4mm (opcionales pero útil)
- Surtido piezas; 7805 regulador de 5v, 3.3v un regulador (LD1117V33, opcional), un conmutador de encendido/apagado, alambre (corta mujer a hombre), un conector USB hembra (opcional, elegir este o el 3.3v regulador)
")



")








