Paso 4: Construcción de mi versión de los L298
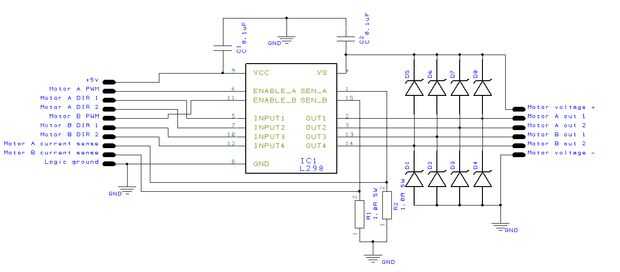
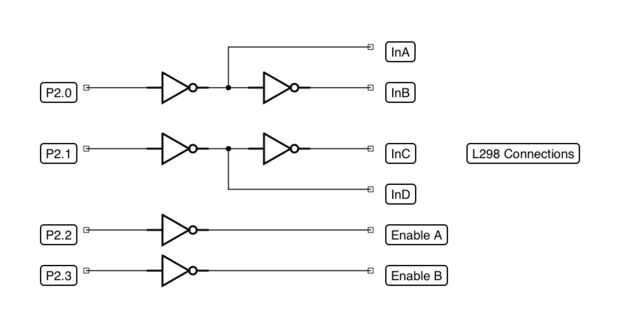
La hoja de datos (a continuación) y la imagen del esquema exacto que utiliza son tremendamente útiles para buscar pins y lo que va donde. Este cableado para arriba es básicamente siguiendo esos 2 documentos, pero he incluido un segundo diagrama sobre cómo el hex inversor está conectado a todo esto.
https://www.Sparkfun.com/datasheets/Robotics/L298 _...
Básicamente, el sis del inversor entre el MSP430 y L298 y 4 salidas del MSP430 ir al inversor, y las 6 salidas del inversor van al L298.
Así, los 8 diodos usados se arreglan en tal un puente de manera rectificadores funcionan. Cada pin AC va a un cable del motor y como recuerdo la + pernos van a GND y -los pernos van a 5v.
** En el esquema en la foto, pernos de Motor DIR son InA, InB, etc.. Los pines PWM Motor son las patillas Enable. He utilizado los nombres que se utilizan en la hoja de datos.
")



")








