Paso 5: Alambre diferentes partes
1. Conecte el USB Host Shield a la placa Arduino Uno.
2. Conecte el motor de elevación al controlador electrónico de velocidad
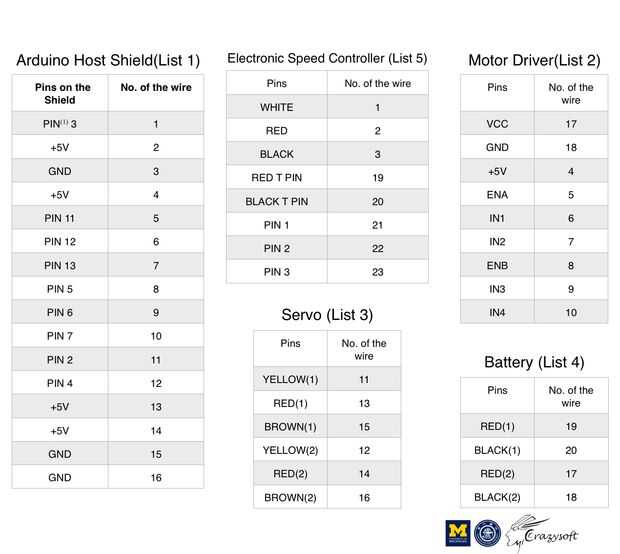
una) siga la lista 1 y lista 5 para conectar el escudo del anfitrión al controlador electrónico por los alambres del n º 1, 2 y 3.
b) Conecte el controlador electrónico de velocidad para el motor de elevación de los cables del no. 21, 22 y 23.
3. Siga la lista 1 y lista 2 para conectar las tarjetas de conductor del motor al blindaje del anfitrión por los cables del no. 4 al 10.
4. Conecte los dos servos
una) siga la lista 1 y lista 3 para conectar un servo con el escudo de host de los cables del no. 11, 13 y 15.
Escudo de b) Conecte el otro servo para el host de los cables del no. 12, 14 y 16.
5. Conecte las dos baterías a las tarjetas de conductor del motor y el controlador electrónico de velocidad
una) siga la lista 2, lista 4 y lista 5 para conectar una batería al controlador electrónico de velocidad por los cables de No.19 y 20.
b) Conecte la otra batería al tablero de conductor del motor de los cables del 17 y 18.
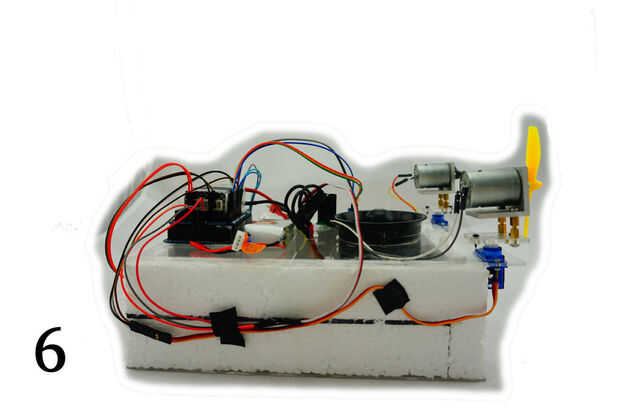
6. el efecto global después de que el cableado se muestra.



")

 con Arduino y Android(bluetooth)")



")

")

