Paso 9: Volar el helicóptero

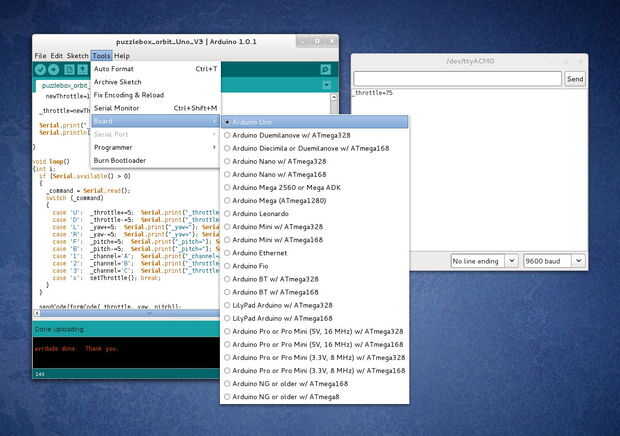

En el paso 5, hablamos de cómo utilizar el IDE de Arduino para conectar a la placa Arduino y cargar el software. En el menú «Herramientas» de la IDE de Arudino encontrará una opción para "Serial Monitor". Tirando hacia arriba y asegurándose de que velocidad en baudios se ajusta a 9600 le permitirá utilizar su teclado para configurar comandos de control al helicóptero.
Se pueden introducir los siguientes comandos, uno a la vez (seguida de la tecla "Enter"):
U: incrementar ligeramente la válvula reguladora (este valor hace que el helicóptero despegó de la tierra)
D: disminución del acelerador ligeramente
L: incrementar ligeramente la guiñada (esto debe hacer que el helicóptero se incline y vuele a la izquierda)
R: disminuir el desvío un poco (esto debe hacer que el helicóptero se incline y vuele a la derecha)
F: incrementar ligeramente la echada (esto debería causar el helicóptero se incline y volar hacia adelante)
B: disminuir el tono un poco (esto debe hacer que el helicóptero se incline y vuele al revés)
P: conjunto del acelerador al 85% (aproximadamente equivalente a flotando en el aire)
0: acelerador se establece en 0 (tierra).
Muchos dispositivos de IR apoyan el concepto de "canales" que permiten que varias versiones del mismo vehículo a utilizarse en la misma área al mismo tiempo sin interferir los controles. Esto puede ser controlado a través del software, así:
1: seleccione el canal de control "A"
2: canal de control seleccione "B"
3: canal de control seleccione "C"
Hay un esquema de control adicional por el cual se puede establecer directamente un nivel específico del acelerador. En otras palabras, si quisieras hacer el helicóptero desde una posición sentada hasta que asoma en un nivel específico, a través de experimentar con los comandos "U" y "D" podría determinar que un acelerador de 85% es sólo de derecha para lograr que permanezca en un solo lugar. Entonces podría definir inmediatamente este nivel mediante el comando de control "x" seguido de un número de tres dígitos:
085 x: Set del acelerador al 85%
x000: ajuste del acelerador a 0%
x100: Set del acelerador al 100%
x048: conjunto del acelerador al 48% (etc..)
Este último mecanismo de control es particularmente útil si fueras un desarrollador tratando de escribir una aplicación que podría volar el helicóptero autónomo o según las condiciones externas específicas. Por ejemplo, cuando la órbita Puzzlebox está siendo operada bajo el control de cerebro utilizando unos audífonos de EEG, sería deseable que el despegue de helicóptero y suspender siempre que la concentración mental y el enfoque están por encima de cierto umbral. Software conectado a Arduino mediante un puerto USB simplemente podría emitir el comando de acelerador de suspender en ese momento ("x085"). Cuando la concentración cayó nuevamente por debajo de ese umbral, el comando de acelerador 0% podría emitirse ("x000").
Tomando un paso más, sería posible para un lazo causar el helicóptero suavemente de y de la tierra enviando brevemente los valores intermedios (x030, x040, x050 x060, x070, x080, x085 y viceversa a tierra).
Por último, un completo "plan de vuelo" podría crearse para causar un helicóptero para subir, volar hacia delante, la sala del círculo y aterrizar otra vez, usando una combinación preprogramada de los métodos anteriores.
Si usted desea adquirir su propia órbita Puzzlebox, en el momento de escritura está disponible a través de Kickstarter:
http://www.Kickstarter.com/projects/puzzlebox/puzzlebox-Orbit-Brain-Controlled-Helicopter

")











