Paso 10: Marco de estructura: parte 2

Ha llegado el momento para que usted pueda conectar el cerebro de lo quadcopter, la Junta de control de vuelo, con la otra electrónica. Para este paso necesita la caja negra de procedencia en el controlador de vuelo. Siga estos pasos:
- Coloque un poco de pegamento caliente en cada una de las cuatro esquinas del tablero.
- Poner la placa en y compruebe que no caen hacia fuera después de que el pegamento seque rápidamente.
- Ahora Conecte el altavoz a la Junta y corte una pequeña sangría en el soporte para que el cable no está dañado.
- Cuando sostiene el tablero y el marco al corte en la parte superior de la Junta, se dará cuenta que el corte en los lados es un poco demasiado pequeño para el servo conduce a conectar demasiado. Por lo tanto mantenga la Junta bajo el marco, la flecha que apunta hacia la batería y marca donde van los cables de servo.
- Tomar el cuchillo de precisión y a tallar un poco de material entre las marcas que hiciste. Ahora conecte un cable de servo en cada lado, para comprobar si se ajustan:
- Si es así... Continúe con el paso 6
- Si no... Llevar material un poco más hasta que se ajuste
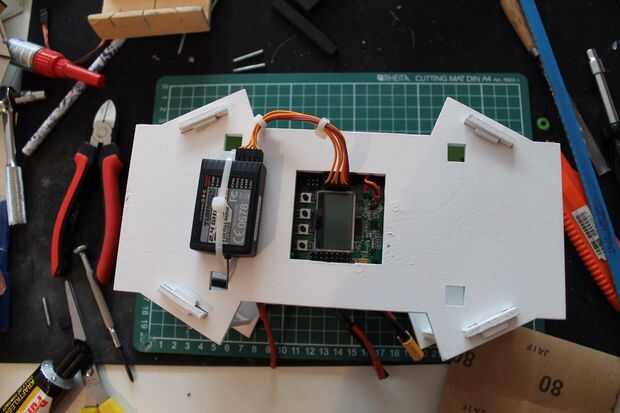
- Ahora use la pistola de pegamento caliente para fijar el tablero de control de vuelo al corte en la parte superior, la pequeña flecha que apuntando a la batería
Ahora han conectado el cerebro al marco, pero realmente no está conectado todavía. ¿Recuerde que el servo que conduce en el paso 7? Esto es lo que hará con ellos:
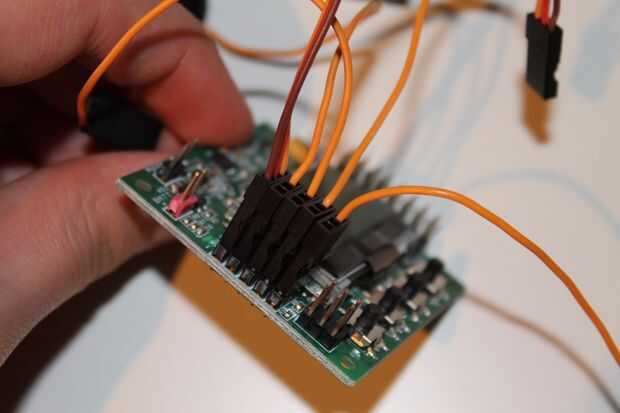
- Poner el cable de servo normal, que normal, en el primer canal en el lado izquierdo de la tarjeta de control de vuelo, los pines están alineados como esta:
- Negativo - marrón
- Positivo - rojo
- Señal - amarillo
- Ahora saque el receptor y el enchufe el servo normal conducir en canal 1 y todos los demás correspondientemente (canal 2, 3...). Cuidado con que alinee los pasadores correctamente.
- Puede conectar el receptor con una sujeción de cable a la estructura como se muestra en la fotografía.
- También fijar la antena con cinta de aislamiento de algunos al lado, como se muestra en la fotografía y poner las misma marcas de cinta sobre el armazón del motor (la antena del receptor debe estar en el marco del motor 4)
Ahora ha llegado el punto donde se puede conectar el servo ESC lleva en el tablero de control de vuelo. El tablero de control quiere que les enchufe de esta manera cuando se mira en la parte delantera del quadcopter:
- Canal 1: Tapa Motor izquierda
- Canal 2: Tapa Motor derecha
- Canal 3: Motor parte inferior izquierda
- Canal 4: Motor inferior derecho


 para principiantes")





 | Herramientas de bricolaje para madera #6")
 | Herramientas de bricolaje para madera #5")
")

 con Arduino y Bludrinodroid")
