Paso 2: Firmwares (instalación y configuración)

Para cargar el código para el controlador de vuelo es necesario descargar la fuente código y arduino ide. también se necesita programa de estación de control de tierra de misión planner para la instalación y configuración y usted-programa para la configuración de gps.
Versión de código fuente: r4 arducopter-mpng 3.0.1
Versión de Arduino: arducopter-arduino 1.0.3
Versión del planificador de la misión:1.3.34
Versión de U-centro:v8.18
Aquí están algunos enlaces para obtener más información
1.http://copter.ardupilot.com/ (usted puede encontrar todo lo que necesitas)
2. http://docs.megapirateng.com/documentation/general...
3.https://github.com/MegaPirateNG/ardupilot-mpng
4. http://www.hobbyking.com/hobbyking/store/uploads/9...
5.http://xxl-modellbau.de/abbildungen/quadcopter/flu...
Nota: Olvides leer el archivo readme en el archivo de código fuente mpng.
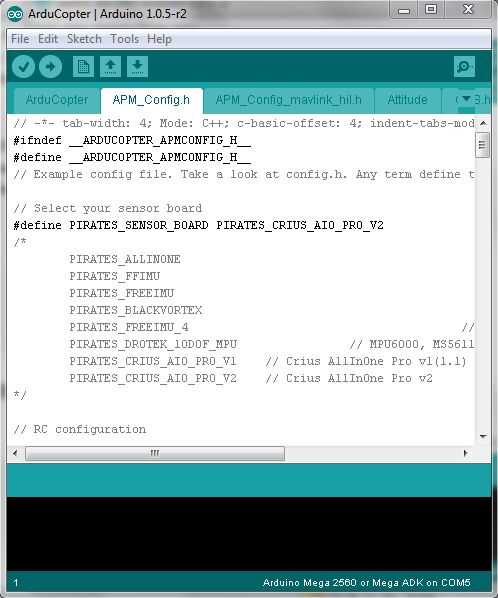
Después de descargar el código fuente de github (secciónDescargar como ZIP ) encontrar el icono de pde dentro del archivo mpng. copiar y cambiar el archivo pde con el icono del pde en el directorio lib en arduino. Copiar todos los archivos de biblioteca al directorio .../libraries/arduino. Ahora abre el arduino y vaya a preferencias de agregar la carpeta de directorio de código mpng. Seleccione HAL Junta megapirateNG al programador Arduino como ISP y seleccione la tarjeta atmega 2560. se realizan.
Ahora abre el código de ' Sketchbook ' y abra la ficha de config.h . Para la configuración de código fuente, toda la información se incluye en megapirateng enlace.
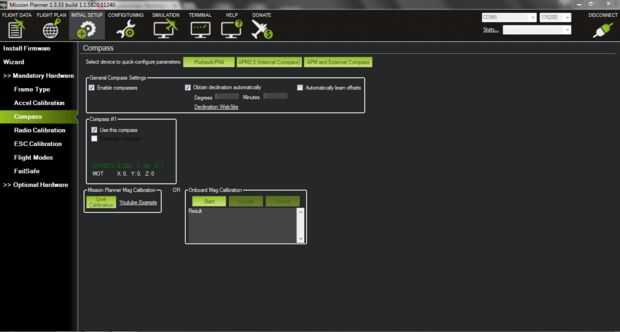
Después de cargar el código abrir el planificador de misión y presione conectar a 115200 baudios. Para la configuración y setup inicial puede hacer clic en el enlace de la primera. Calibre magetometer, acelerómetro, radio etc..













