
Propósito: para control quadcopter via Microduino Joypad.
Dificultad: HighTime-consumo: seis horas
Fabricante: Microduino Studio-PKJ
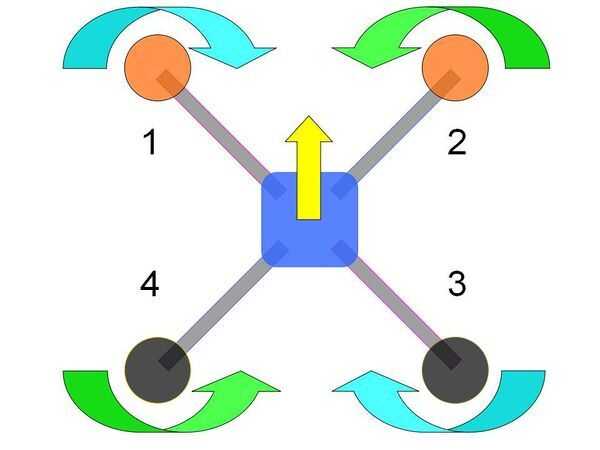
Quadcopter, también llamado un helicóptero cuadrotor, es similar a un helicóptero, que puede volar o ser suspendido en el aire. Como un helicóptero tradicional, adopta un rotor principal para generar la elevación y un rotor de cola para compensar el torque generado por el rotor principal (es decir, bloqueo de cabeza). A diferencia de ese método de impulsión, el motor diagonal de lo quadcopter adopta los pros y contras diseño de hélice. Entonces no necesita ningún marco extra tener bloqueo de oído. Como se muestra en la figura 1.1, las hélices Nº 1 y Nº 3 son un par de diagonal pros y contras los propulsores y el nº 2 y Nº 4 son otro par. Cuando la velocidad de giro mantiene de la misma, el par generado por el propulsor pro compensará el par generado por el propulsor de contras para mantener la dirección sin cambios (como se muestra en la flecha). En el diagrama esquemático, el quadcopter más común es la forma de X. (También hay una especie de Cruz quadcopter, que es fácil de reconocer, pero tiene una pobre movilidad).
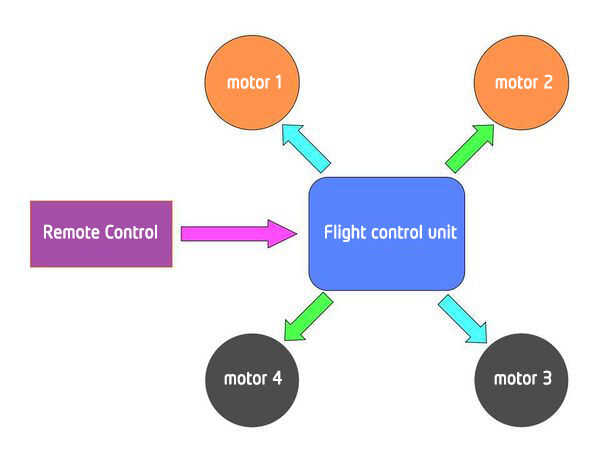
Avión general modelo del fijo-ala, el controlador no es que sea necesario y algún jugador no instalan en los aviones de ala fija. Distinto, el quadcopter es un sistema prohibitivos con tres grados de libertad y cuatro control de entrada, que necesita un sistema de control para hacerse cargo. De causa, hay algunos detalles de la tecnología para ser diseñado en el proceso, tales como los datos de lectura del sensor debe ser filtrada y el algoritmo PID de la echada, rodillo y desvío adquirido a ajustarse.
Ventajas
Microduino adopta el standard(UPIN-27) de interfaz de único 27Pin en forma de U con tamaño compacto (25.4m m m X 27.95 m) igual a un cuarto. Todos los módulos se pueden apilados juntos a través de UPIN-27, que se entrega listo para conectar. Microduino-Quadcopter sólo necesita cinco módulos funcionales y los Kits de Mont Rack 330 recomienda al menos trabajar. (Microduino base, Microduino-10DOF, Microduino-BT, QuadCopter Microduino y Microduino-Joypad) Y sólo necesita apilarlos junto, que es muy sencillo.













