Paso 4: configuración de...



ADVERTENCIA: No conecte nunca el FC con el USB si la batería está conectada, se fríe el FC y puede dañar tu equipo.
Aunque el quad copter ya viene flasheado con el firmware cleanflight, hay unos pasos que podría hacer para hacer su experiencia más suave y todo tal como te gusta.
Configurador de Cleanflight es una aplicación de chrome de google, usted puede conseguir de
Hay muchas variantes de firmwares para tu FC pero los no está en el ámbito de este documento. Si, en cualquier caso como firmware de betaflight, revisa este video. https://youtu.be/TljzFBZR4zE?t=796
Compruebe la configuración en este orden
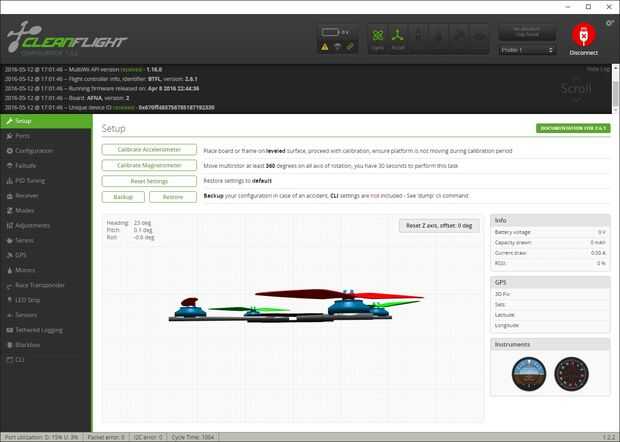
- S etup -> calibrar accelerometar (hacerlo en superficie plana)
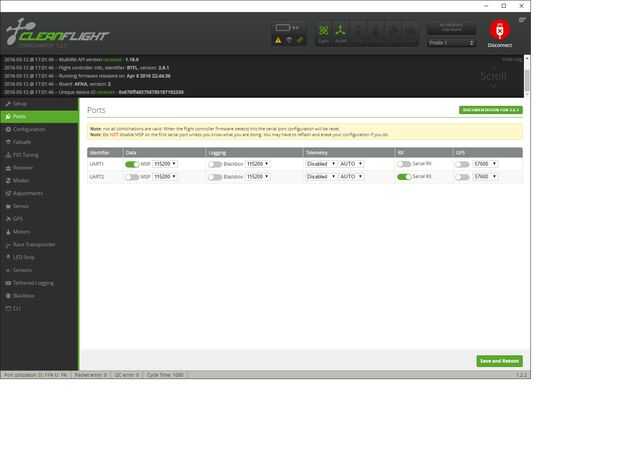
- Puertos -> Activar Serial RX en UART2 (si vas a utilizar a bordo receptor DSM2)
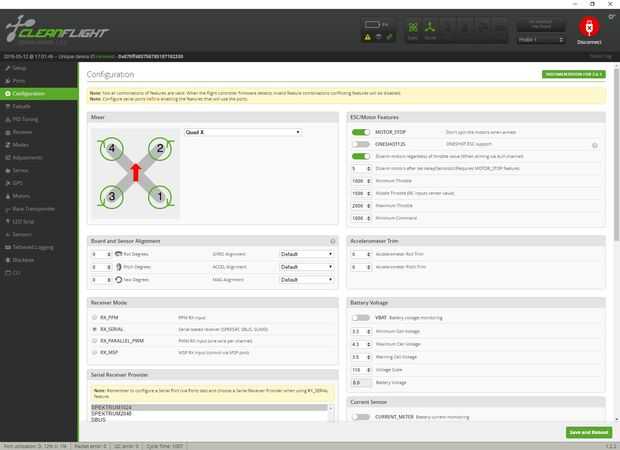
- Configuración -> vuelta en MOTOR_STOP, girar a desarmar motores independientemente del valor de la aceleración, modo receptor establecido en RX_SERIAL (si vas a usar a bordo DSM2 receptor), set proveedor receptor serial a SPEKTRUM1024
- Sintonización de PID -> controlador de uso LuxFloat PID, ajuste los valores como los tengo o puedes experimentar por ti mismo, puedes bajar las tarifas si usted los encuentra demasiado TICs :) (siempre tienen tasa de rodillo y de echada en el mismo valor, será más fácil en usted)
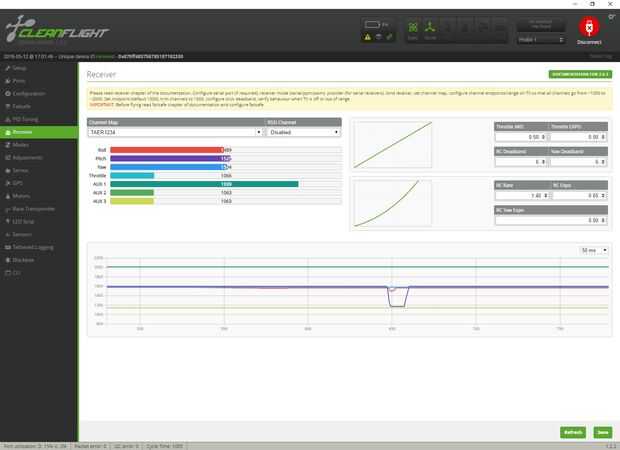
- Receptor -> Si has limitado al receptor, se puede ver lo que los valores aquí sus informes de receptor
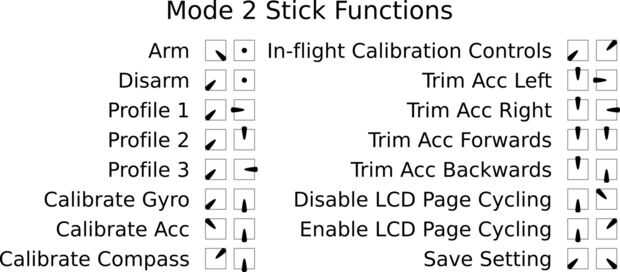
- Modos -> esto es donde se configura la manera usted quiere volar (modo de ángulo, horizonte o acro/aire) y también, el interruptor para armar el quad
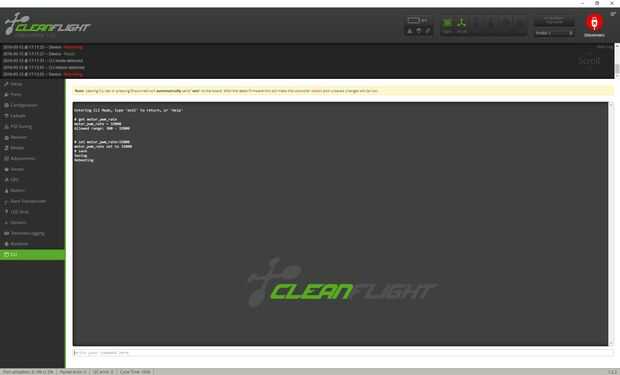
- CLI -> set motor_pwm_rate = 32000; guardar



 barata Mino HD")









