Paso 2: Instalar el controlador de vuelo (Rx)


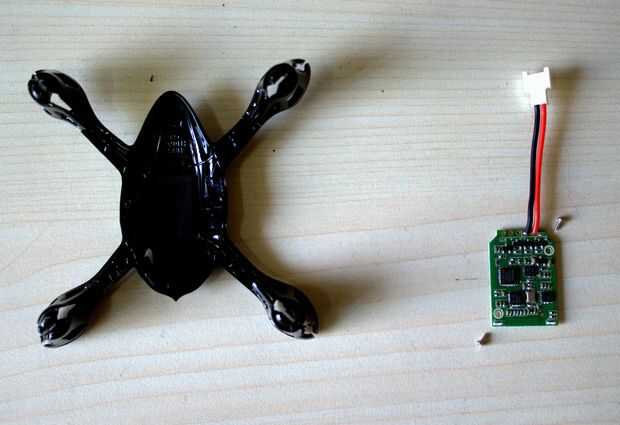

Para controlar el Quadcopter y toda la estructura estable en el aire, se necesita un sistema electrónico que se llama Controller.It de vuelo es el cerebro de lo Quadcopter y utiliza giroscopios para mantener el avión estable.
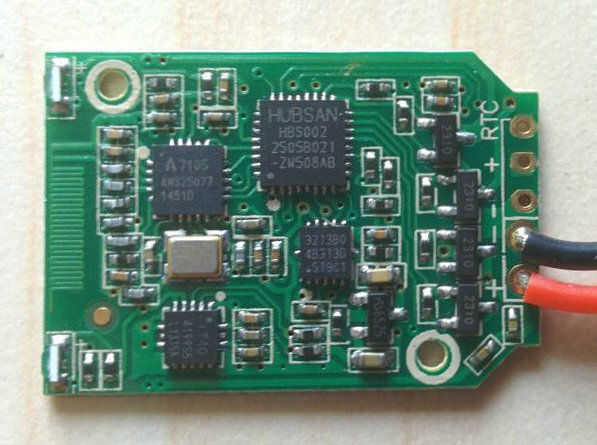
El módulo de receptor Hubsan X 4 (tablero de regulador del vuelo) tiene giroscopio, acelerómetro y receptor de radio todo colocado en una sola tarjeta PCB para minimizar la complejidad y requisitos de espacio. Otra cosa buena es que todos los pads de soldaduras en la Junta son nombrados cuidadosamente. Así que usted puede soldar los LEDs y motores muy fácilmente.
Los principales componentes de la Junta son:
1. procesador Hubsan HBS002
2. Invensense ITG-3050 integrado giroscopio de tres ejes
3. 16 MHz oscilador de cristal de cuarzo
4. 3210AP acelerómetro de 3 ejes
5. A7105 módulo inalámbrico de 2,4 GHz








 Drone...")




