Paso 4: Montar los motores
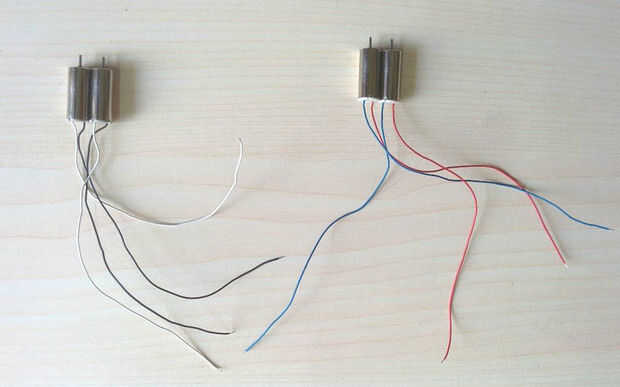





Los motores con la ayuda de propulsores proporcionan la elevación y dirección para el Quadcopter. Son controlados por electrónica velocidad Controller.The Hubsan X4 circuitos de controlador tiene un limpio diseño donde it´s casi imposible conectarlo mal en conexiones equivocadas. Hay dos tipos diferentes de motores hacia la derecha (CW) y contrario a las agujas del reloj (CCW). Los motores vienen con alambre de color diferente para identificarlo fácilmente.
Hacia la derecha--alambre blanco y negro
Sabio de reloj contador--Rojo y azul
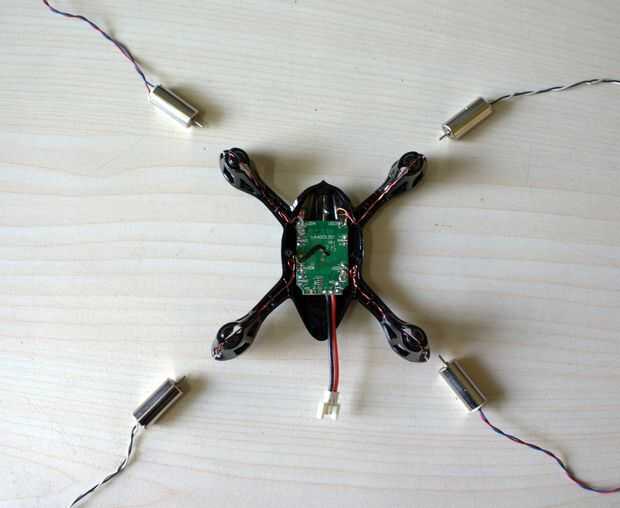
Inserte el cable y presione el motor desde la parte superior para fijarla.
Utilice unas pinzas para hilo hilos los motores de los brazos. Poner por encima de los cables de LEDs.
Luego cortar los cables extras por el cortador de alambre.
Soldar los cables a los pads de soldadura correspondiente (M1, M2, M3 y M4)
Nota: 1. los motores diagonales son del mismo tipo. 2. negro y cables azules son negativos.








 Drone...")




