Antes de entrar en este instructable, una palabra de precaución. La parte de construcción de lego de este instructable no es bastante completa; las listas de las piezas no se acabado y faltan algunas fotos. No estoy en la costumbre de poner a medio terminar el trabajo, pero en este caso, estoy en Austria (lejos de mi robot en Toronto) por 4 meses, así que pensé que daría un sabor del proyecto y un diseño completo del código, para que cuando llegue a casa en septiembre puedo termino rápidamente la lista de piezas y puede crear uno por ti mismo sin apenas vanamente alrededor de. Aunque estoy seguro que podrás descubrirlo. Que gente instrutable como un reto!
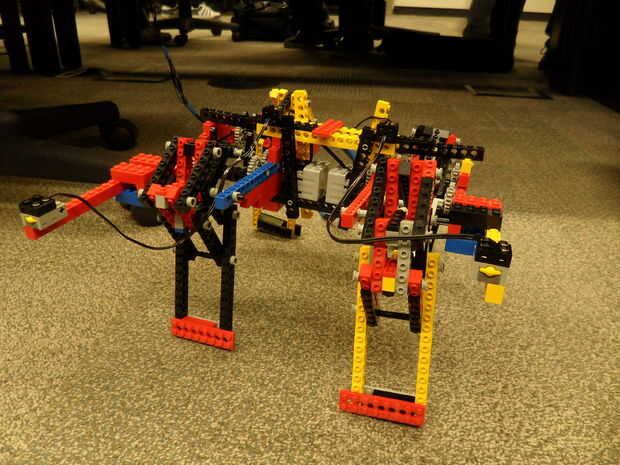
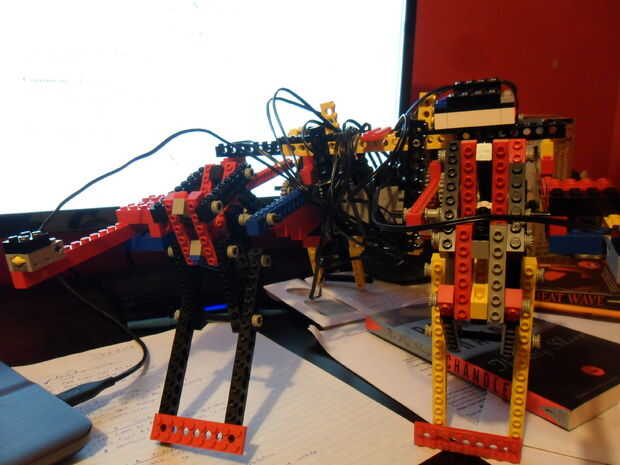
Este instructivo describe la construcción de mi robot quadroped. Originalmente era para un proyecto escolar, pero pensé que podría descomponerlo en unos fáciles pasos. Los fabricantes deben tener en cuenta: este proyecto utiliza un montón de LEGO y algunos componentes especiales, que pueden ser sustituidos por otros. A continuación todos los materiales son las que usé. Bueno, aquí vamos!
En primer lugar, necesitarás algunos materiales (iré en más detalle en pasos posteriores)
-Un tablero de Altera DE2 (es una placa FPGA con una de 50 Mhz reloj, memoria y otras conexiones)
-Una caja LEGO
-Un tablero de control LEGO (enchufes en JP1 de la DE2)
-Dos motores RPM baja de LEGO
-LEGO dos sensores de tacto (sin duda utilizaría sensores de rango o sonar, pero nos habíamos limitado a recursos para el proyecto)
-Un montón de LEGO para construir el robot
Para mantener las cosas simples, voy a dividir este instructable en dos secciones: construcción de Robot (comienza en el paso 1) y codificación (que se inicia en el paso 6).
Para que usted consiga interesado, había montado en una cámara del robot terminado y tomó un video de él caminando. Con un poco de trabajo, este poco chicos definitivamente podrían convertirse en un robot espía.








")
")


")
