Paso 10: Bono: ejemplo Motor paso a paso
Como un bono adicional, este escudo también puede controlar un motor paso a paso solo hasta 5 voltios. Un motor paso a paso le da la capacidad para controlar la posición precisa sin la complejidad de los sensores de posición y control de lazo cerrado caro. El archivo zip sobre también contiene un código de ejemplo para controlar un paso a paso.
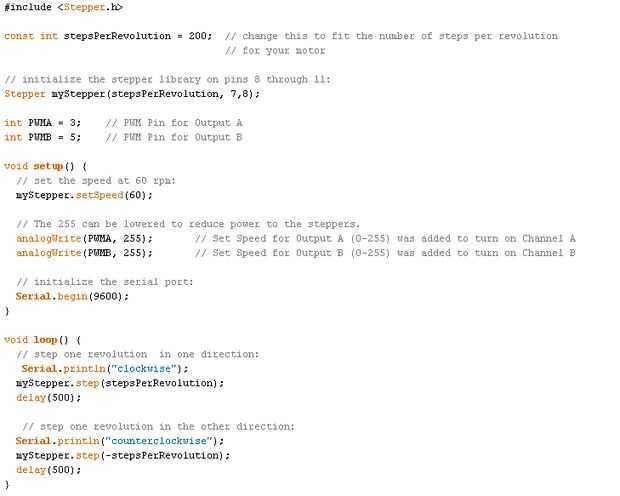
El código de ejemplo siguiente utiliza un en biblioteca Arduino paso a paso para controlar los pasos del motor (de primera línea en el código). Empezamos por definir el número de pasos que nuestro motor tiene por la revolución, en nuestro caso se trata de 1,8 grados por paso, por lo que 200 pasos por revolución.
Siguiente, inicializar la clase paso a paso con el paso por la revolución, así como los dos pernos utilizados para controlar la dirección de las salidas. Las dos últimas líneas antes de la instalación son definir los pines PWM, al igual que nuestro último programa.
La primera línea de nuestra rutina de configuración establece la velocidad a la que queremos seguir el paso a paso. La velocidad máxima está limitada por el tipo de pasos se utiliza (generalmente voltajes más altos significan mayor RPM). Para nuestro paso a paso, hemos podido obtener sobre 60 RPM, el motor impulsor en sus clasificados 5 voltios.
A continuación, necesitamos establecer nuestros pines PWM alto. Esto lo podemos hacer usando la función analogWrite, o la función digitalWrite . Estableciendo los pines PWM en 255, ambos canales son y habilitan. De esta línea, el motor sólo se controlará con los pernos de dos dirección. El puerto serie solo se utiliza para mostrar mensajes a la computadora y es opcional.
Finalmente, llegamos al lazo. El lazo está convirtiendo el paso a paso una vuelta completa, haciendo una pausa de medio segundo y luego una vuelta completa el en la otra dirección. Puede utilizar la función myStepper.step() , con el paso del motor en cualquier dirección.

![Escudo del Motor Arduino DIY [por sólo $8!] (L298N 2x4A)](https://foto.askix.com/thumb/170x110/9/44/944b4e3d55d5395583213b4d0d36ee0e.jpg "Escudo del Motor Arduino DIY [por sólo $8!] (L298N 2x4A)")











