Paso 8: DC Motor código
Ya hemos escrito algo de código para este escudo que puede descargar aquí. Incluye el código para controlar los canales, así como un motor bipolar paso a paso. Ir adelante y abrir el dibujo Dual_DC_Motor.ino.
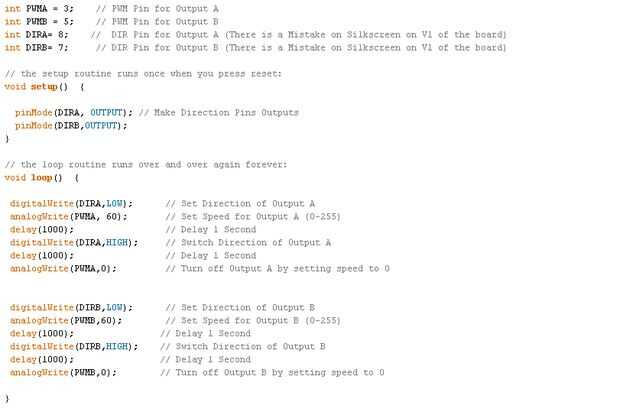
A continuación es lo que debería ver usted abrir el esquema motor. La primera parte del código define el motor de control de pernos. PWM para canal A y B están conectados a los pines 3 y 5 respectivamente. Los pines de control de dirección para el canal A y B están conectados a los pines 8 y 7 respectivamente (Nota: estos no coinciden con la serigrafía en el tablero porque accidentalmente se intercambian las etiquetas de la serigrafía).
La parte de configuración del código configura los pines de dirección como salidas. No hay necesidad para configurar los pines PWM como salidas, como esto ya está a cargo de las funciones de analogWrite. Para controlar la velocidad, puede llama a la función analogWrite ("Canal", "Velocidad") y pasa a la velocidad de cualquier motor intenta control (PWMA o PWMB) y la velocidad a la que usted quiere que vaya (entre 0-255). Para controlar la Dirección, utilizan la función digitalWrite. Un digitalWrite ("Canal", bajo) hará que el motor para girar una forma y un digitalWrite ("Canal", alto) hará que el motor gire al revés. El código completo es simplemente girando un motor en un momento en una dirección, espera un segundo y luego girando al revés durante un segundo.

![Escudo del Motor Arduino DIY [por sólo $8!] (L298N 2x4A)](https://foto.askix.com/thumb/170x110/9/44/944b4e3d55d5395583213b4d0d36ee0e.jpg "Escudo del Motor Arduino DIY [por sólo $8!] (L298N 2x4A)")











