Robots industriales son verdaderamente increíbles máquinas CNC – – no sólo por su velocidad, potencia y precisión, sino porque también son altamente adaptables. A diferencia de otras máquinas CNC, cuando usted pone una herramienta en el extremo del robot, completamente transformar lo que puede hacer: poner un pulverizador en él, y se convierte en un robot de pintura; Colóquese a una pinza, y se convierte en una manipulación del robot; puso un soldador, y se convierte en un robot de soldadura por puntos.
Esta adaptabilidad ha hecho que el robot industrial una pieza clave de la infraestructura para la automatización de fábrica en los últimos 50 años. Pero a pesar de su capacidad de adaptación, robots industriales son bastante tontos máquinas: no tienen poco a ningún conocimiento del ambiente fuera de sus tareas programadas. Esta es una de las principales razones por qué los robots industriales han prosperado solamente en ambientes altamente controlados, como fábricas. Necesitan lugares donde objetos impredecibles (a.k.a. personas) están estrictamente separados de sus zonas de trabajo.
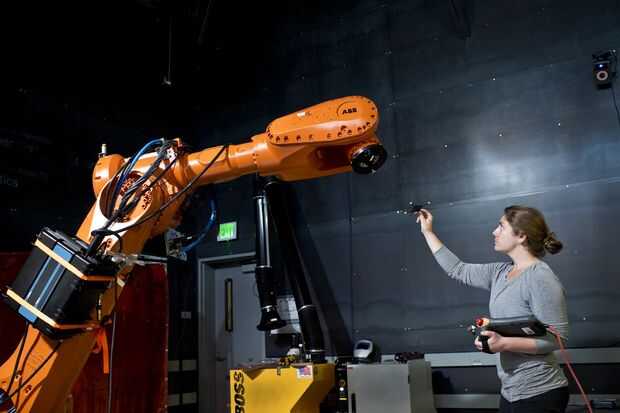
Pero la adaptabilidad de un robot industrial es útil más allá de la fábrica. Colocando una cámara en un robot industrial da a un director de cámara precisos, repetibles y complejos movimientos. Poner un cargador en un robot industrial da a un trabajador de la construcción una forma para mover cantidades pesadas de materiales. Poner una luz en un robot industrial da un fotógrafo más preciso control de ambiente de la escena. Mientras que estos son casos de uso algo mundano, burlan de algunos de los desafíos más grandes para llevar robots industriales fuera de la fábrica: porque son ciegos en el mundo, son muy peligrosos a utilizar; porque necesitan habilidad altamente técnica al programa, son muy difíciles de usar.
Por caída 2015 programa artistas el muelle 9 en residencia, decidí abordar estos dos desafíos y construir una forma para robots industriales ser más seguro y fácil de utilizar en entornos no controlados. He creado Quipt, un software de control basado en el gesto que da conciencia espacial de robots industriales y espaciales comportamientos para interactuar de cerca con la gente.
P9 aire perfil: Madeline Gannon del muelle 9 on Vimeo.
Saber más sobre cómo Quipt fue hecha en los pasos siguientes...
Ver la página del proyecto completo aquí.

")




 /w Arduino")






