Paso 8: Agregar un piloto automático




Para esta modificación, usted necesitará los siguientes elementos.
1 x 3 DR APM 2.5 +
Juego de 1 x 3DR Radio telemetría (complemento a la anterior)
1 x GPS módulo (Add-on para $20 anteriores o conseguir esta mejor)
3 x 8" cables de servo de macho a macho (este es un pack de 10)
Velcro
Plexiglás o algo fino y plano para hacer una plataforma
El GPS, si planea correr en la calle frente a su casa, recomendaría el $90 Ublox GPS sobre el MediaTek $20. El MediaTek hace bien si se tiene una vista clara del cielo todo pero el Ublox solo que es mucho mejor y para un vehículo de tierra, va a ser importante tener que poco más de precisión. Yo ya ha ejecutado el borde de la acera varias veces y han tenido que detener el carro de la conducción en los buzones porque no tengo el GPS mejor.
Para comenzar, usted querrá tomar la parte superior de la camioneta. Ahora tienes un Tonka convertible! A no ejecutarlo como eso. Durante mis pruebas con el piloto automático, me topé con el bordillo y voltea hacia atrás y se rompió la antena de transmisor de video. Me alegro de que mi GoPro no estaba instalado en el momento. Si tienes la parte superior de estilo Bronco, necesita la habitación para poder realizar esta modificación. Si tienes la parte superior de la barra de rodillo, puede obtener sin quitarse. No tengo un carro como ese ya por lo que no pude probarlo. Una vez que haya terminado, a poner la tapa en proteger todo.
Una vez la tapa, usted querrá medir la sección en la parte posteriora y corte una pieza de plexiglás para encajar en esa zona. Las medidas para mi fueron 7 7/16" y 2 3/4". Usarás el Velcro en la parte inferior de la hoja para pegar la pieza en los dos asientos traseros de la camioneta. Si haces un poco de gestión de cableado, debe ser capaz de adaptarse a su receptor, UBEC y cables todo por debajo en el espacio entre los dos asientos sin ningún problema. Limpia la instalación anterior y hace más fácil trabajar con.
Una vez que la plataforma de corte y colocar con Velcro después de la colocación de la prueba, retírela y póngala a un lado. Necesitamos quitar las conexiones de servo en el receptor para la dirección y del acelerador. Para un sistema de Futaba, que será canales 1 y 2. Si se etiqueta todo como he mencionado anteriormente, debe ser fácil de encontrar! Apartar los conectores por el momento. Tome dos de los cables de servo de macho a macho y enchufe el receptor donde usted acaba de quitar los conectores de la ESC y servo de dirección. Luego tomar su otro macho a macho cable y conectarlo a un canal abierto que es un interruptor de dos posiciones. En mi instalación era canal 9 pero su configuración puede ser diferente. No olvide etiquetar los extremos que no están enchufados para que sepa que es para la dirección, acelerador y cambio de modo. Después de etiquetar todo, cuidadosamente vuelva a colocar el receptor en el espacio entre los dos asientos traseros y colocar la plataforma de Velcro en los asientos para que tenga un lugar para el piloto automático.
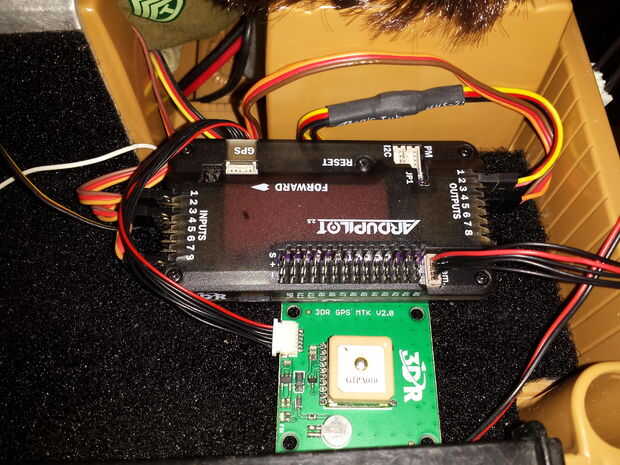
En este punto, tome el cable macho a macho que corresponde a la dirección y conéctelo en el canal 1 de entrada. A conectar el cable para la válvula reguladora en canal 3 de entrada y por último, el cable del interruptor de modo irá en el canal 8 de entrada.
¿Recuerde que el servo y el cable de la ESC que se mudó a un lado? Enchufe el cable de servo en el canal 1 de salida. Antes de conectar el ESC, usted querrá poner el poder de alambre en el conector de servo si ha quitado previamente. El manejo servos sin voluntad BEC de la ESC y 6 V proporcionan la energía en el carril de salida. Una vez que haya conectado hacia arriba, enchufe en canal 3 de salida.
DEBE HACER AHORA! Quite el jumper JP1 en este momento. El puente normalmente permitiría la ESC el APM y servo(s) pero el Traxxas ESC pone a 6 V y sería freír la placa piloto automático. Con el jumper quitado, usted necesitará suministrar energía a la entrada y salida. La salida es cuida por la ESC si seguiste las instrucciones en el párrafo anterior.
¡ ADVERTENCIA! Si tu BEC externo fue alimentando sus servos en 6 V, necesitará cambiar la configuración en el BEC de 6 V a 5 V o freírlos tu tablero! Si usted utiliza una unidad más barata de China, sólo asegúrese de que el puente está en la posición de V 5. Si utilizas el castillo uno que relaciona en mi BOM original, entonces usted necesitará reprogramar a 5 V. Si sólo tienes un BEC V 6, entonces usted necesitará conseguir un 5 V uno. Una vez que haga este cambio, la entrada debe ser muy bien como se debe accionar el resto de tus servos y APM del BEC externo de los pasos anteriores en este instructable.
POR FAVOR TENGA CUIDADO CON LOS VOLTAJES Y SIGA LOS PÁRRAFOS ANTERIORES.
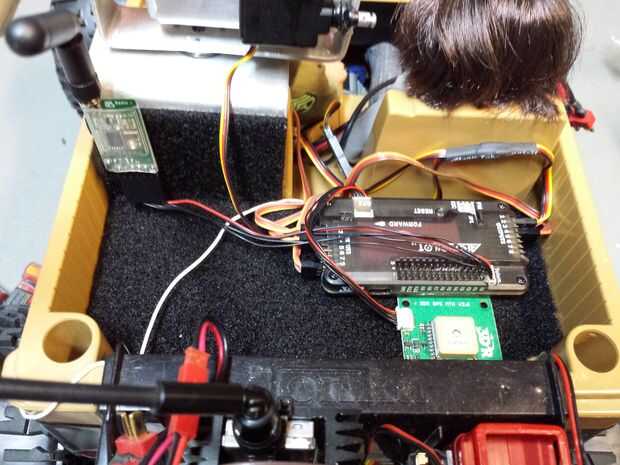
En este punto, enchufe el módulo de telemetría y GPS en el APM 2.5 + en sus respectivos puertos. Entonces, a poner un Velcro en la APM 2.5 + tablero, en la parte posterior del GPS y en la parte posterior del módulo de telemetría por lo que permanecerán en el lugar. Pone hacia fuera así que usted puede conseguir todo en la pequeña plataforma que con la antena de color marrón y blanca en el GPS apuntando hacia el cielo. Si usas el GPS Ublox, no conecte el conector del sensor magnetómetro como APM 2.5 tiene una a bordo. Si compraste el 2.6 de APM, entonces usted tendrá que enchufar el cable de magnetómetro el módulo APM y GPS.
En este punto, avanzar a la siguiente sección para configurar el tablero sí mismo!











")
")
")