Paso 13: Brazo derecho (tirador de dardos) (cont.)
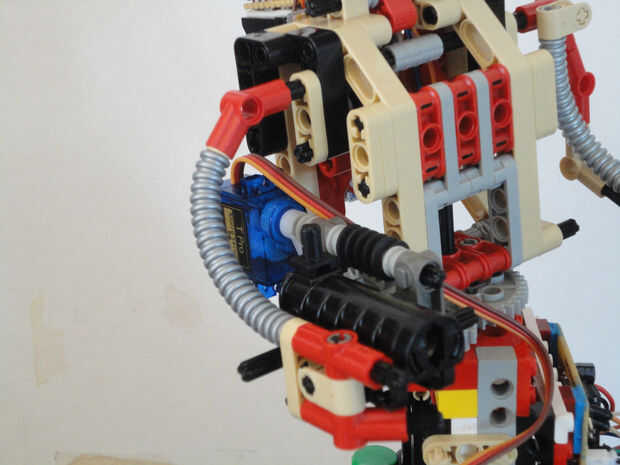
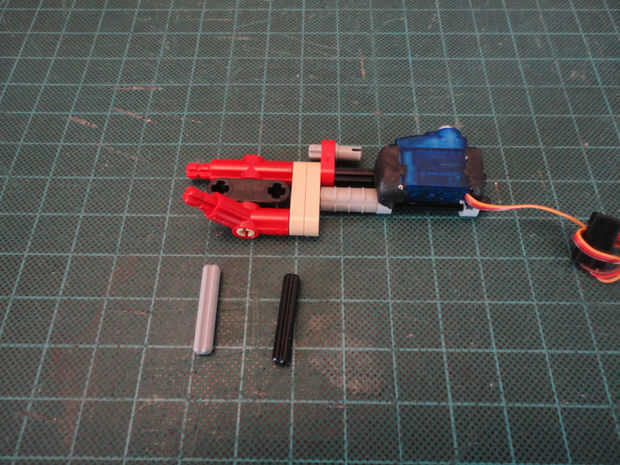
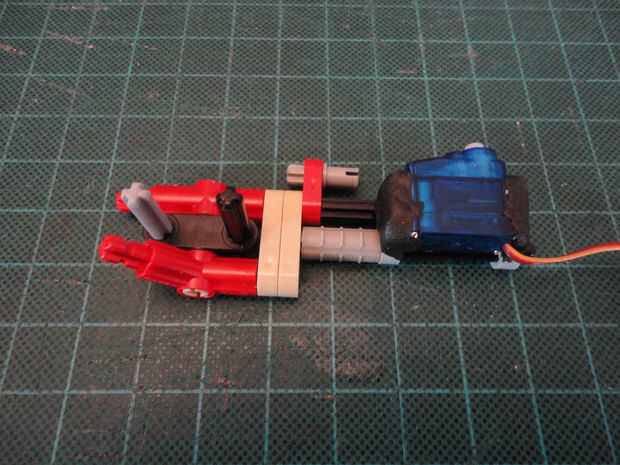
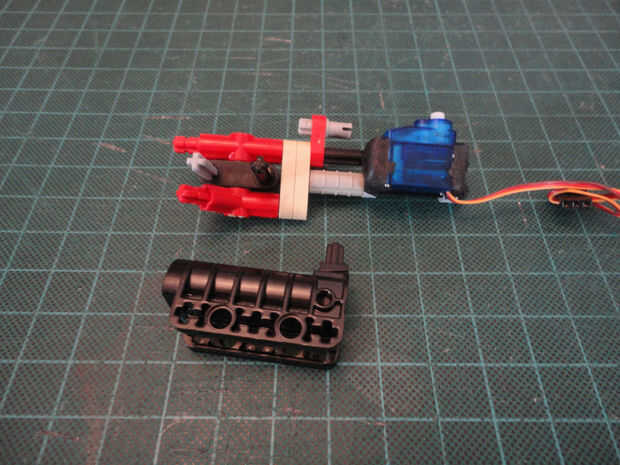
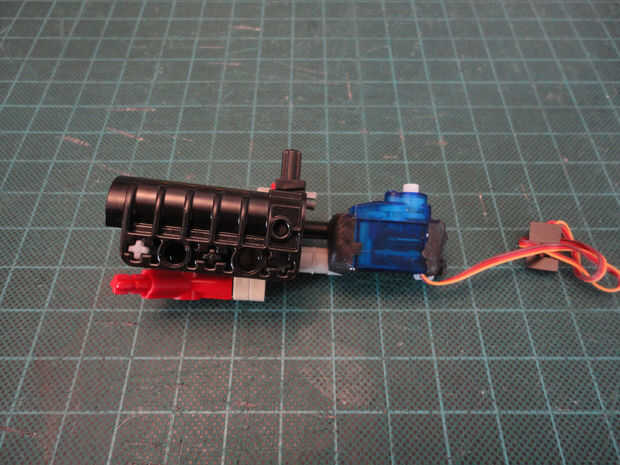
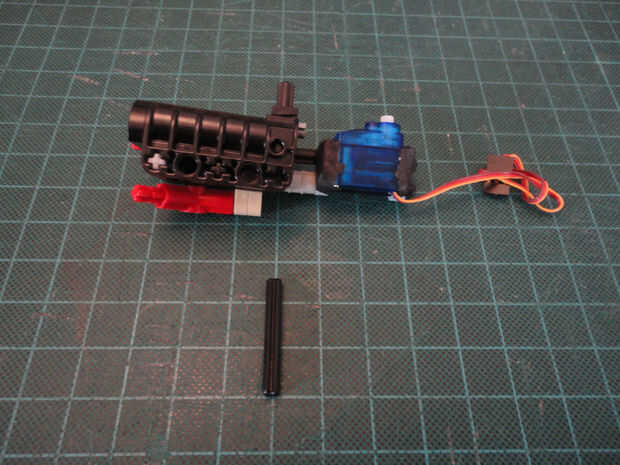
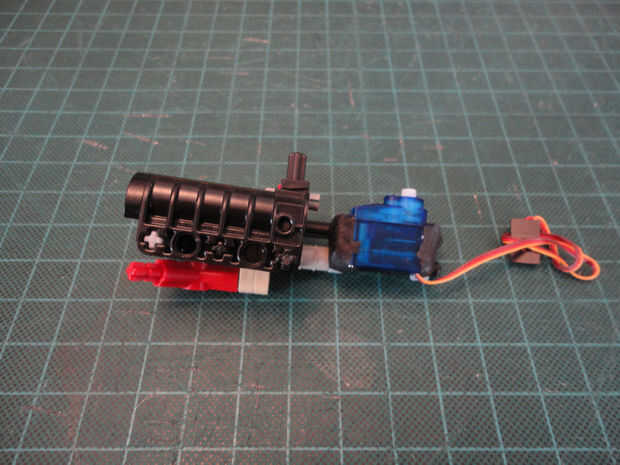
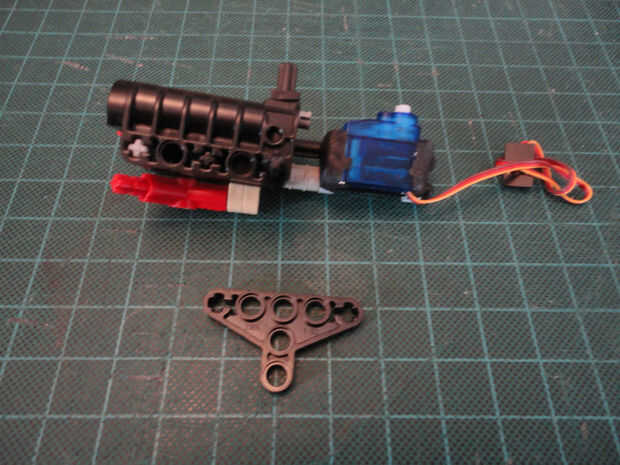
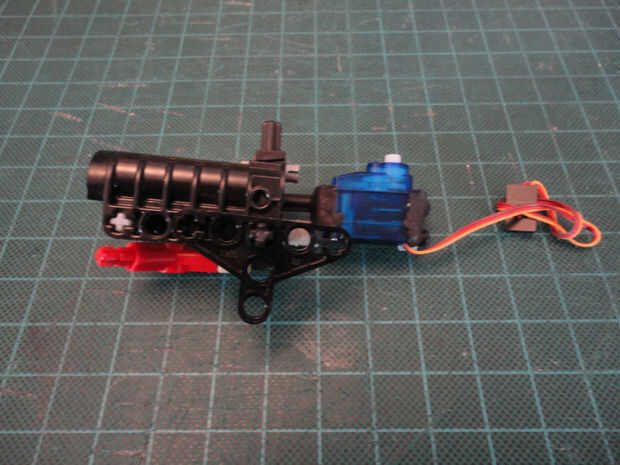
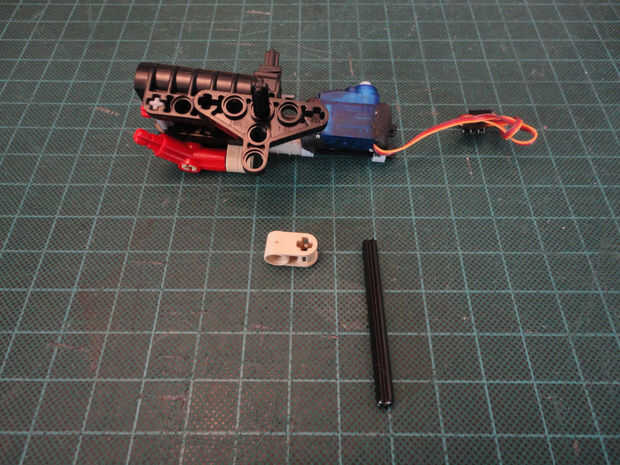
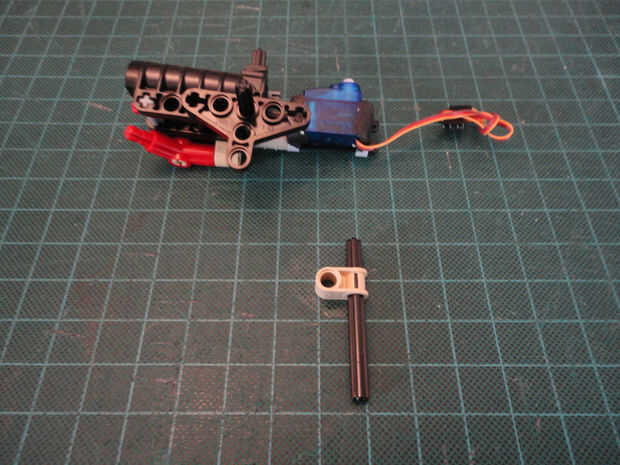
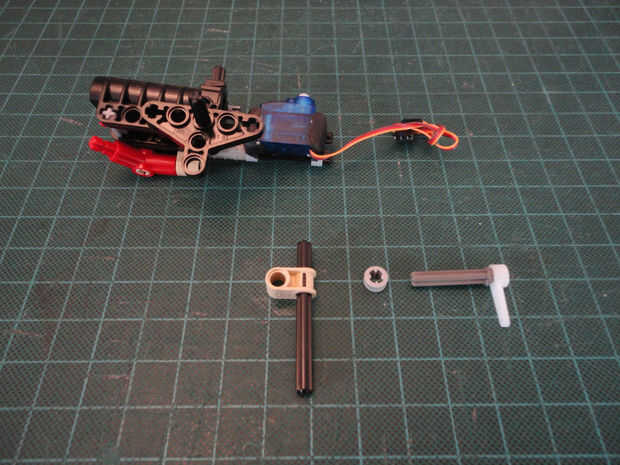
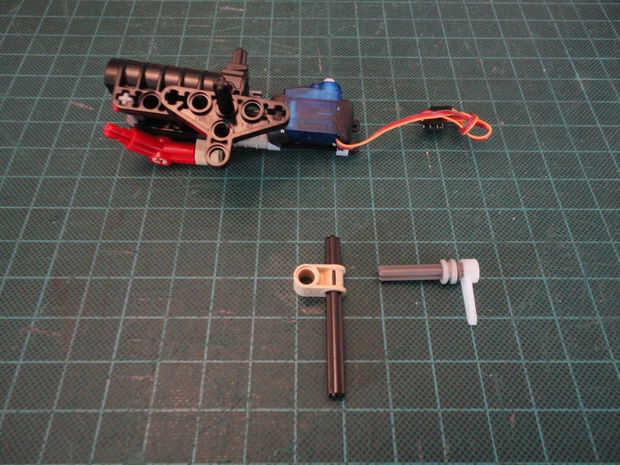
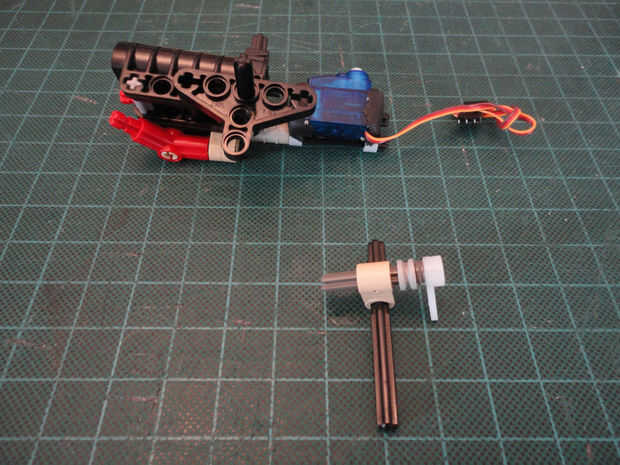
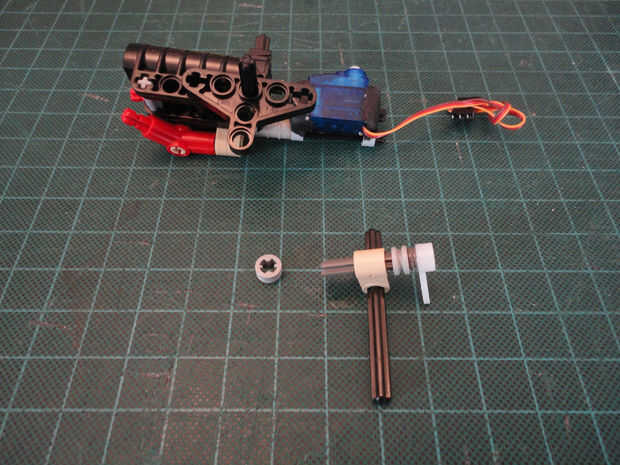
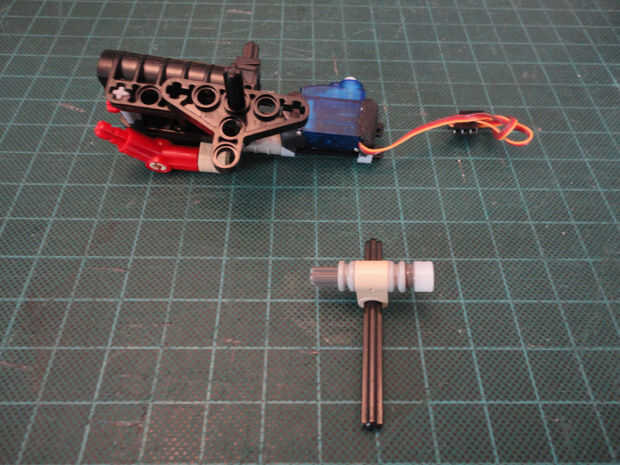
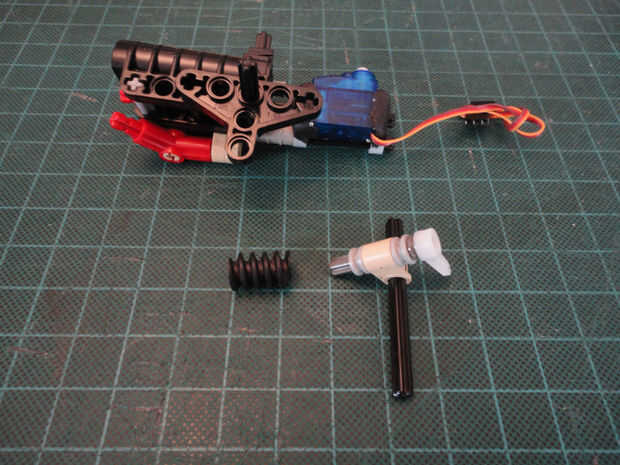
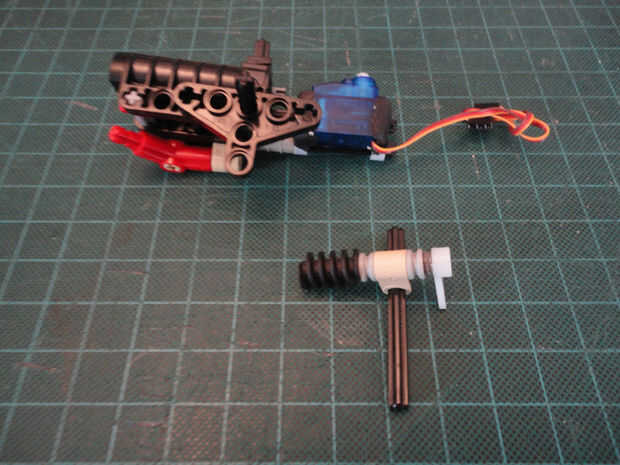
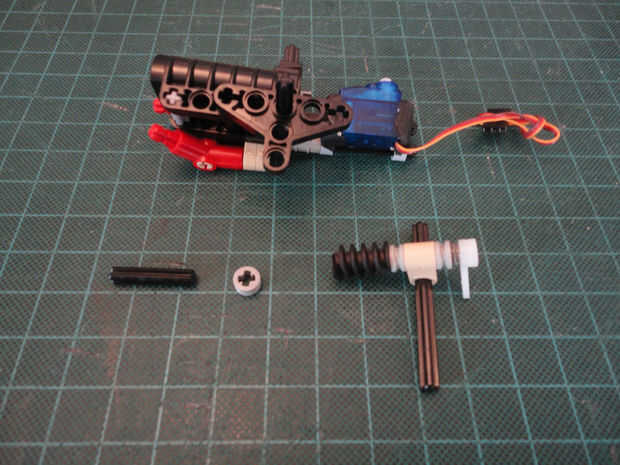
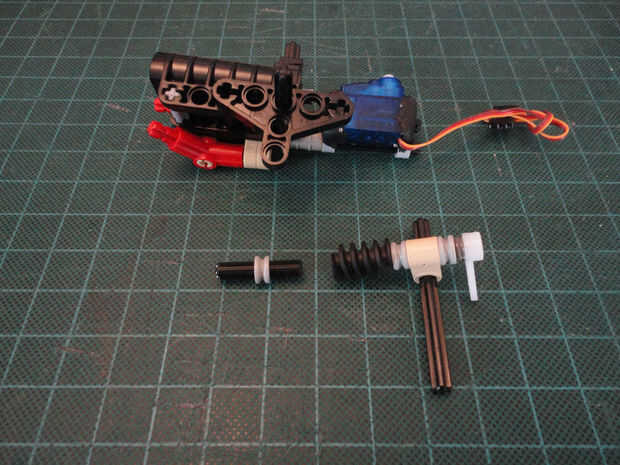
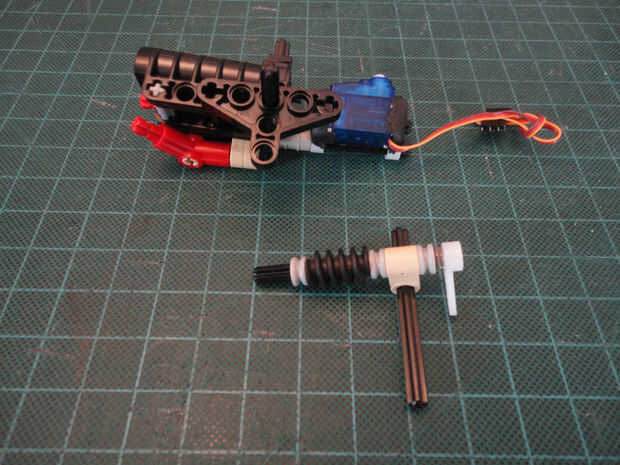
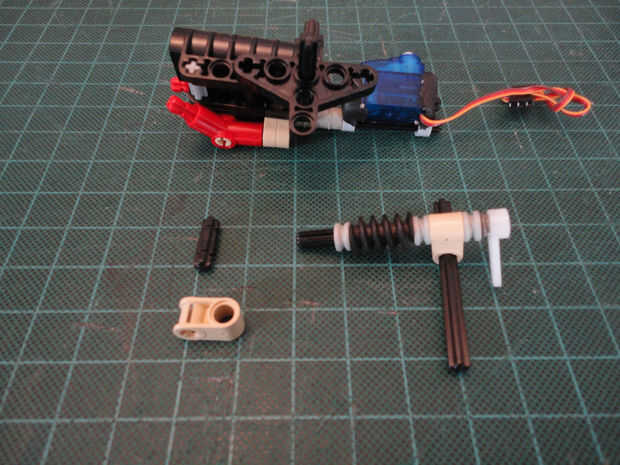
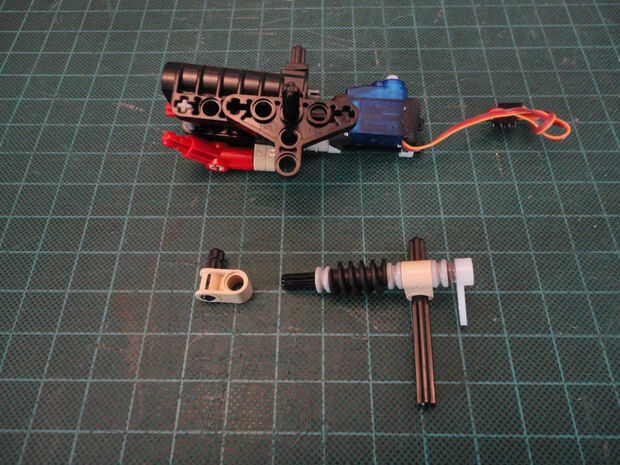
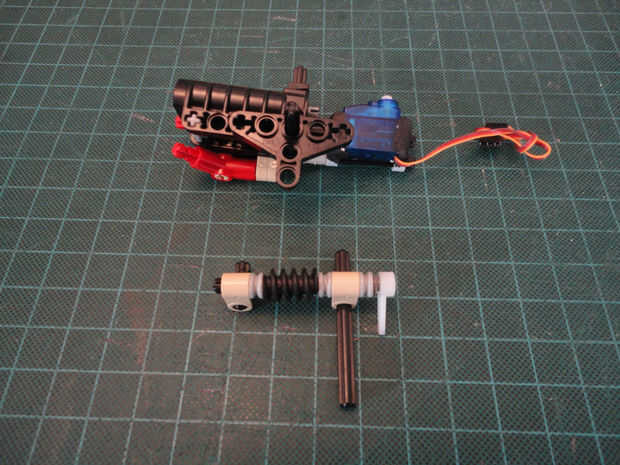
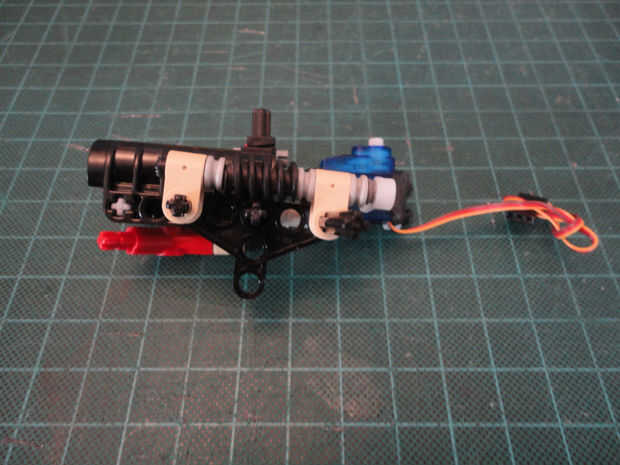
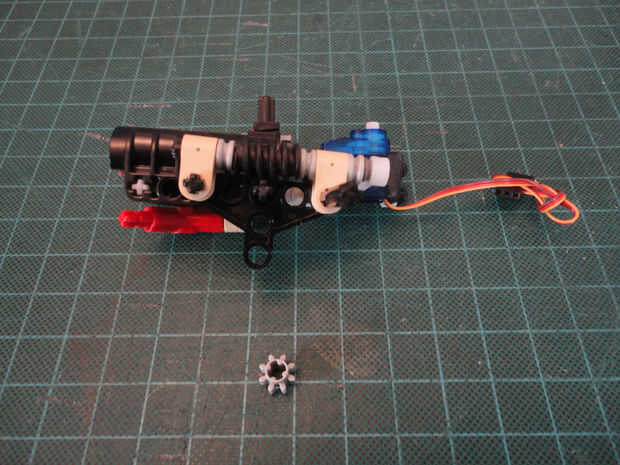
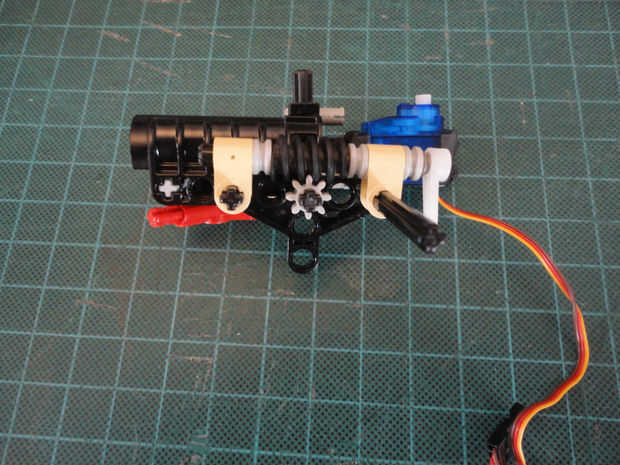
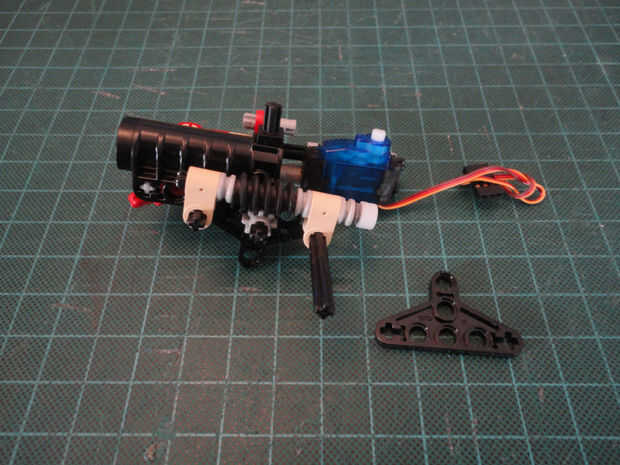
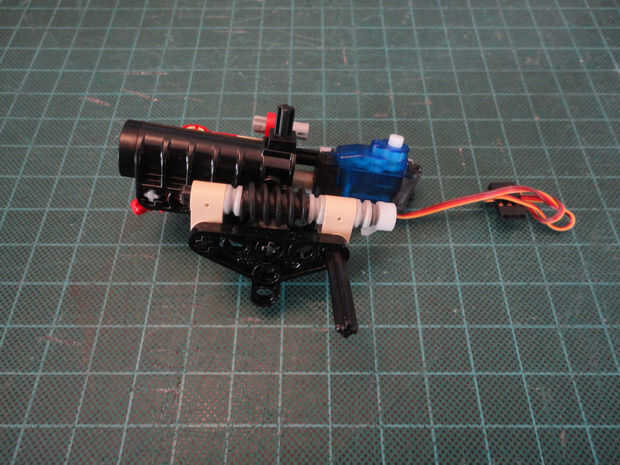
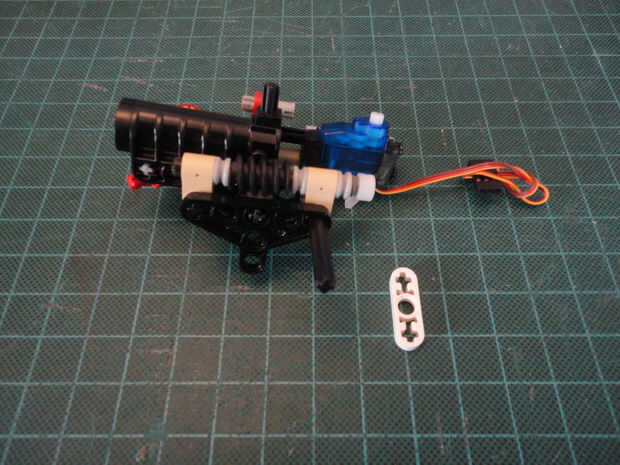
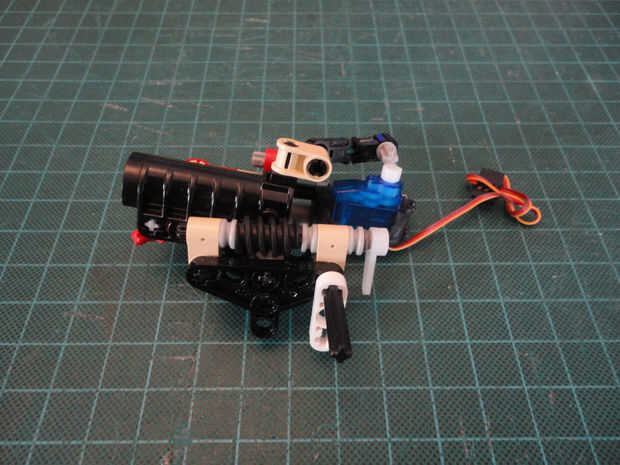
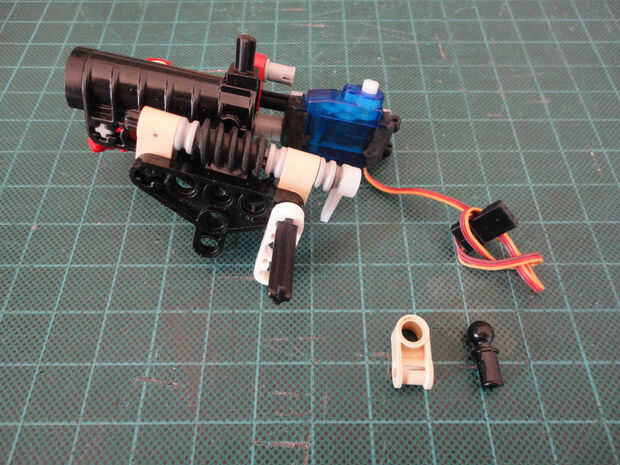
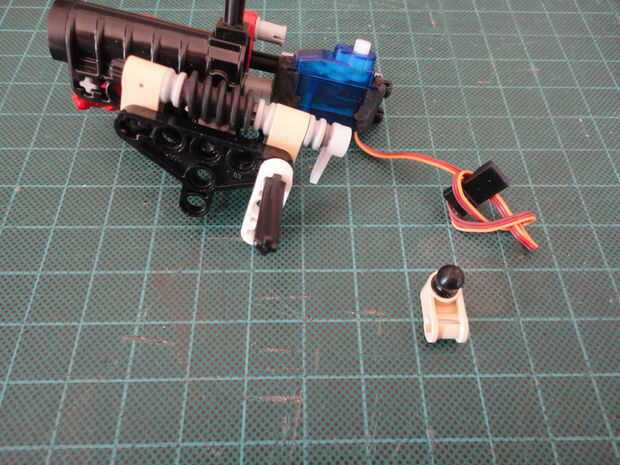
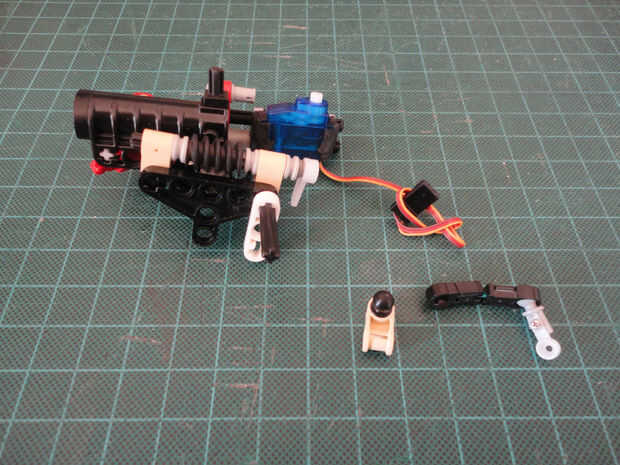
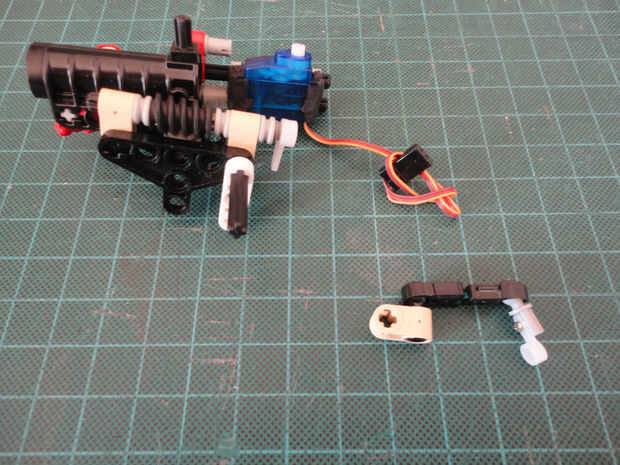
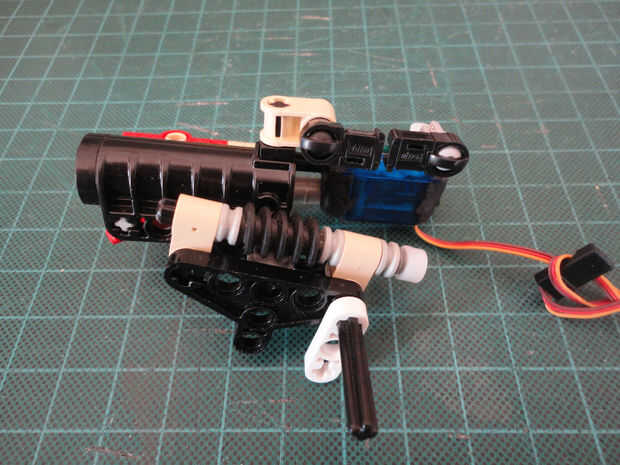
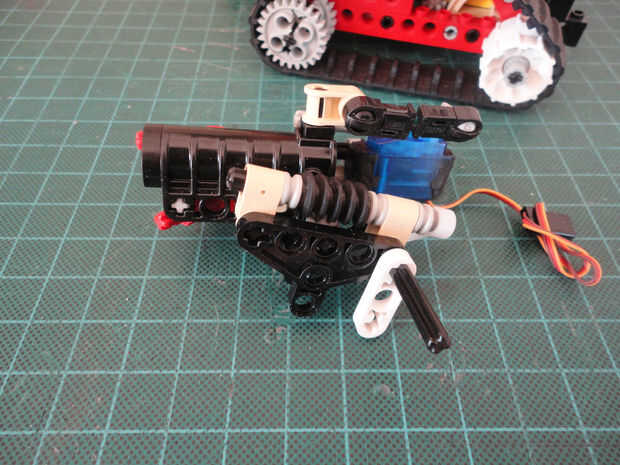
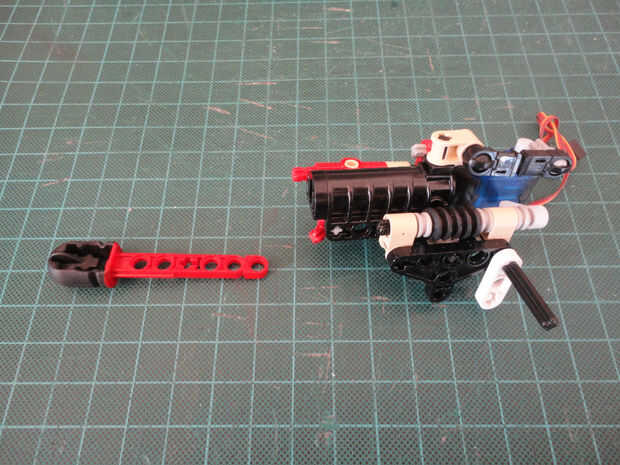

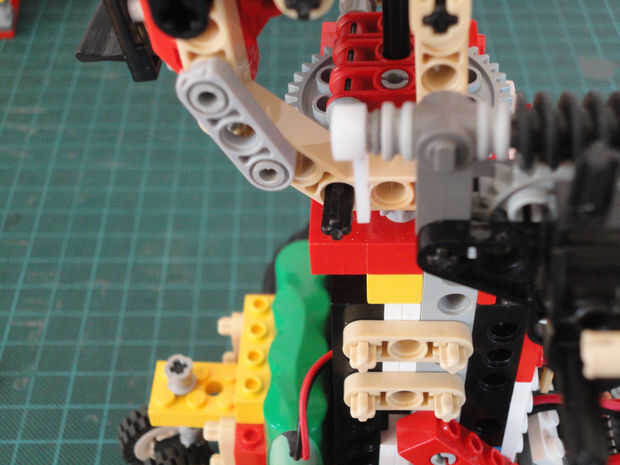
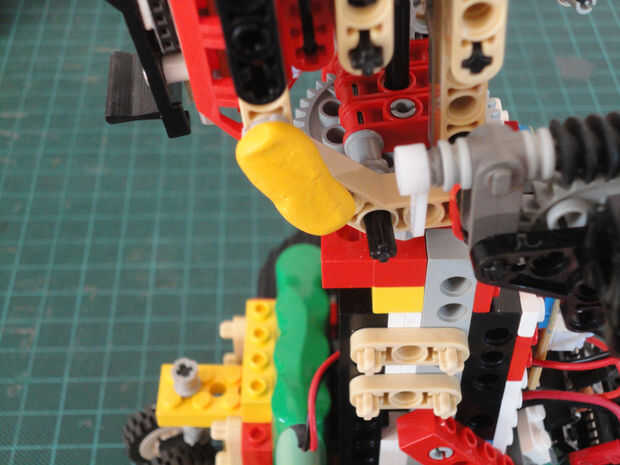
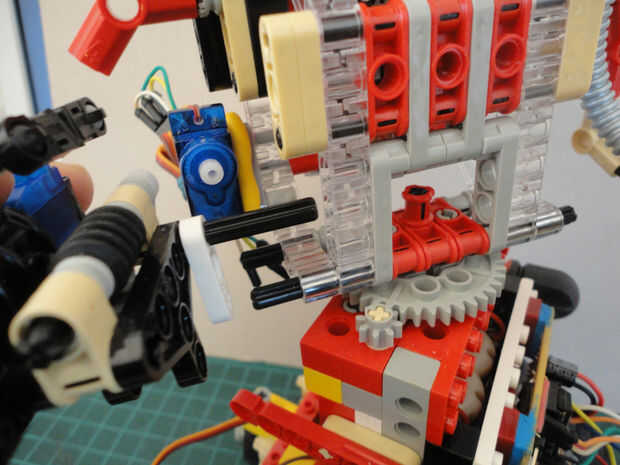
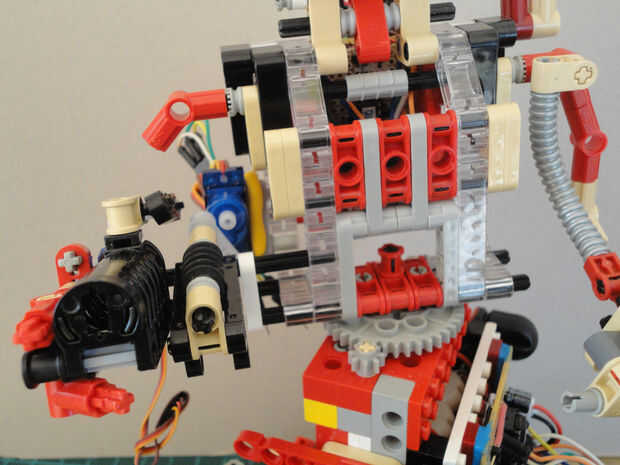
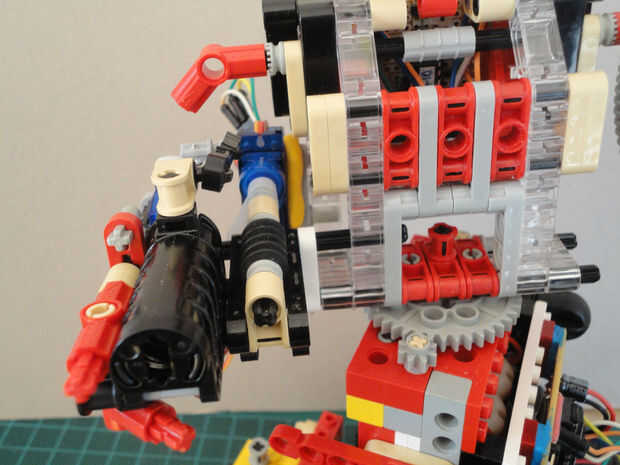
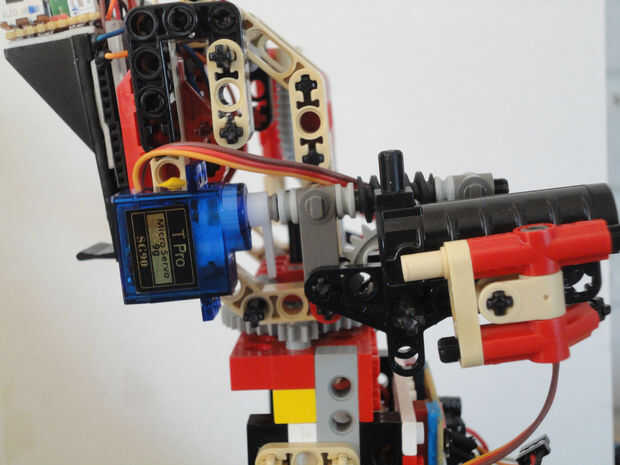
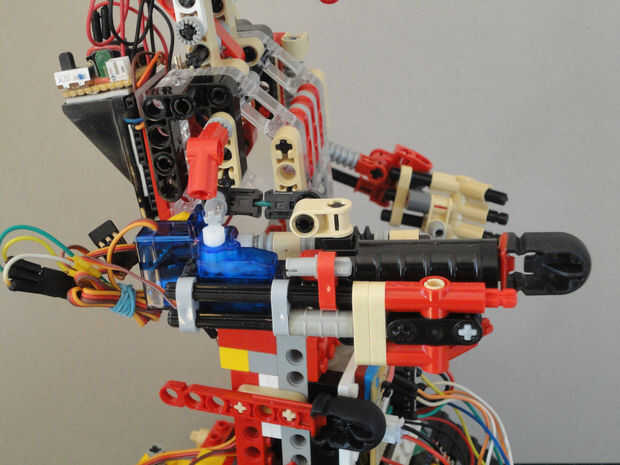
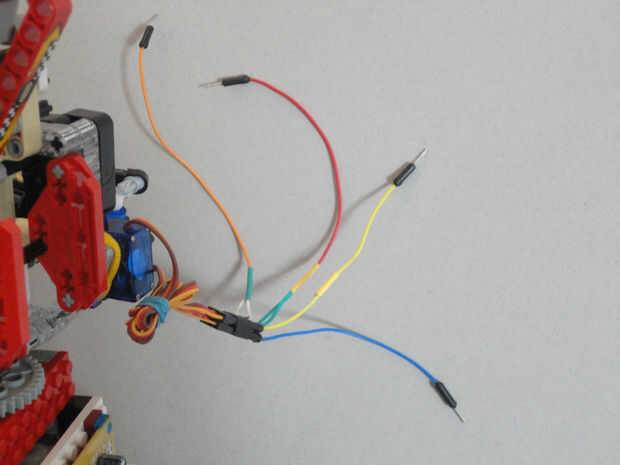
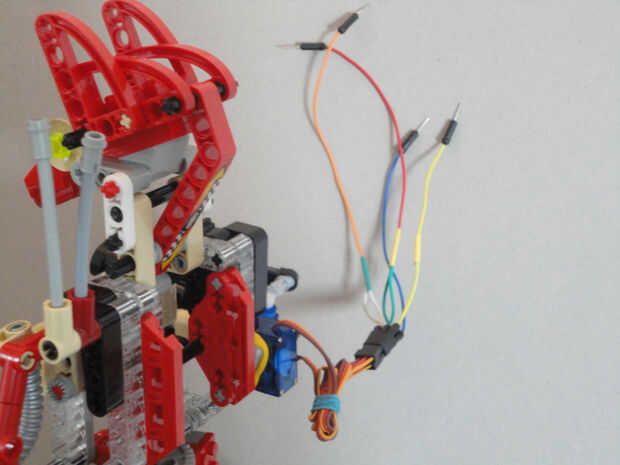
Foto 1, 2 Dos cruzan de árbol de 3M (#3705)
Foto 3, 4 Cañón de competencia (#57029)
Foto 5, 6 Cruz de eje 4M (#4519)
Foto 7, 8 Triángulo de Liftarm fina (#2905)
Foto 9, 10 Eje y perno conector Perpendicular (#6536) y Cruz de eje (#)
Foto 1 de 1, 12, 13 1/2 Bush (#32123) cuerno del servo montado así como la cruz eje 3 M con poste de madera (#6587)
Conector de 1/2 Bush Foto 14, 15 (#32123)
Foto 16, 17 Engranaje de gusano (#4716)
Foto 18, 19, 20 Cruce eje 3M (#4519) y conector de 1/2 Bush (#32123)
Foto 21,22, 23, 24, 25 Cruz de eje de 2M con el surco (#32062) y conector de eje Perpendicular (#6536)
Foto 26, 27 8 dientes de engranaje (#3647)
Fotos 28, 29 Triángulo de Liftarm fina (#2905)
Foto 30, 31 Liftarm 1 x 3 delgado (6632)
Foto 32, 33, 34, 35, 36, 37 Eje y perno conector Perpendicular (#6536) y perno con crestas de fricción a lo largo y bola de remolque (#6628)
Foto 38 Concurso flecha Liftarm Shaft(#57028)
Foto 39 9 g servo y Sugru listo para ser instalado in situ.
Foto 40, 41, 42, 43, 44 Muestra cómo el tirador de dardos (cañón) está instalado en el droide.
Foto 44, 45, 46, 47, 48 Muestra cómo para instalar 9g servo (Up y Sown objetivo servo) está instalado.
Foto 49, 50 Muestra el cableado de los servos a Palma Arduino II.
Video
-Probar los servos







")



")

