Paso 4: Cabeza y Torso (cont.)

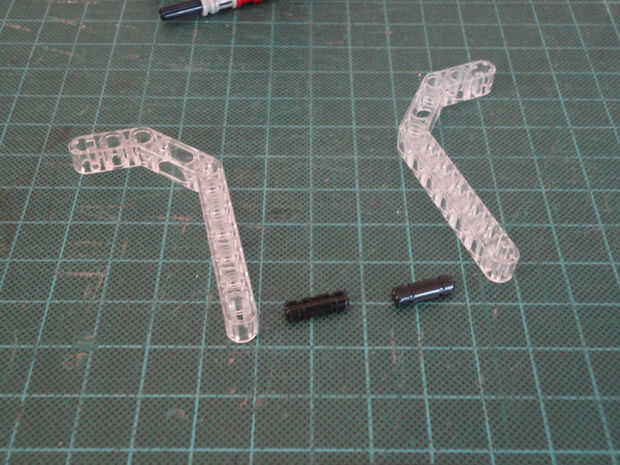
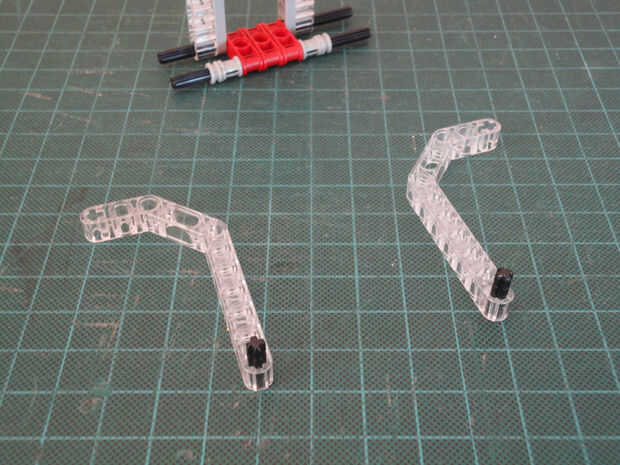
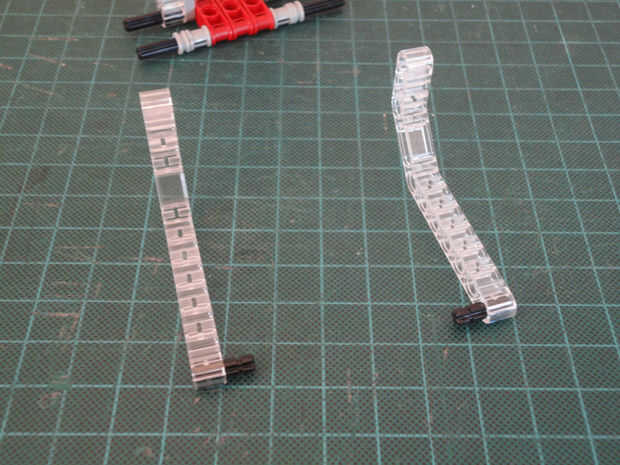
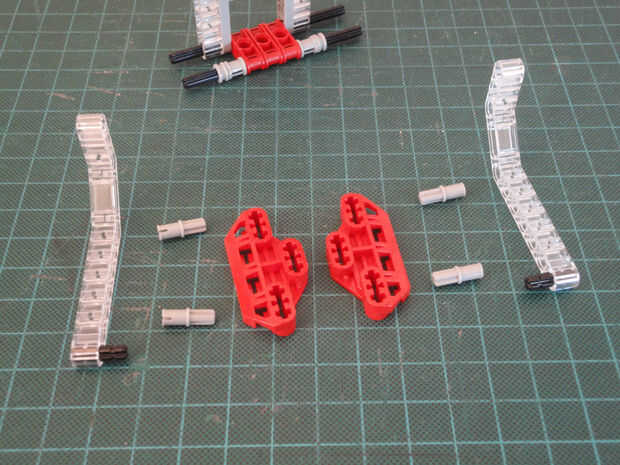
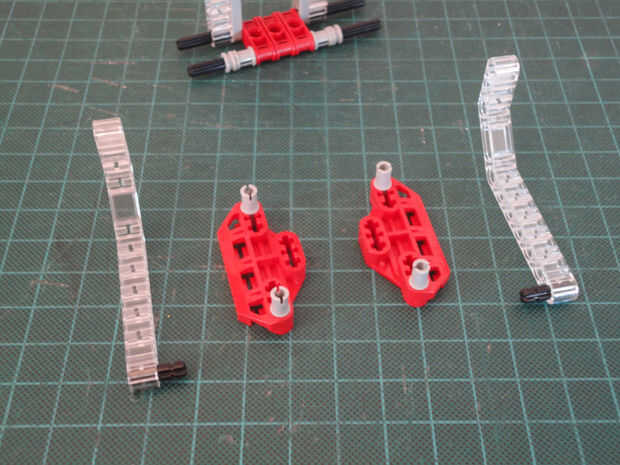
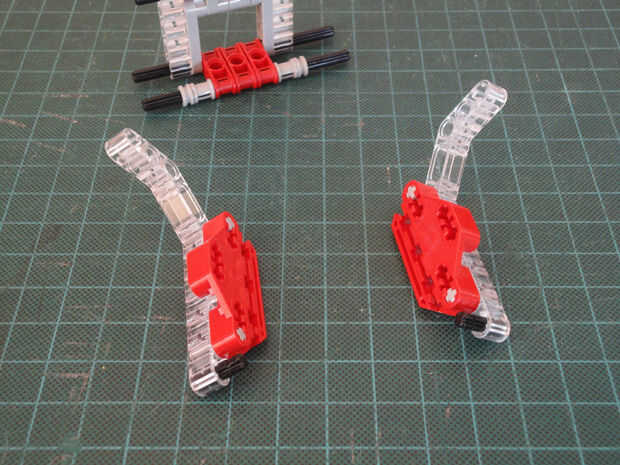
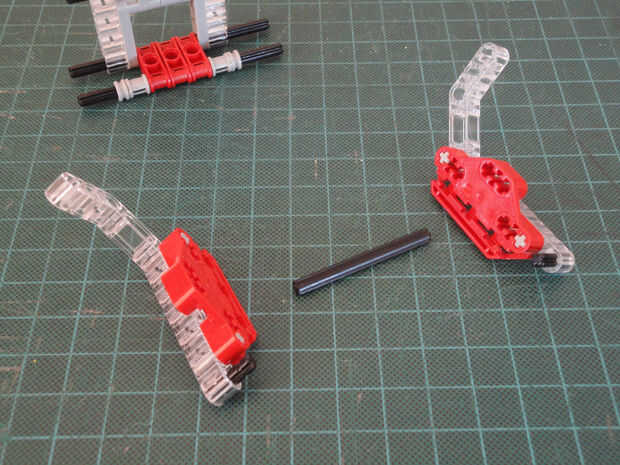
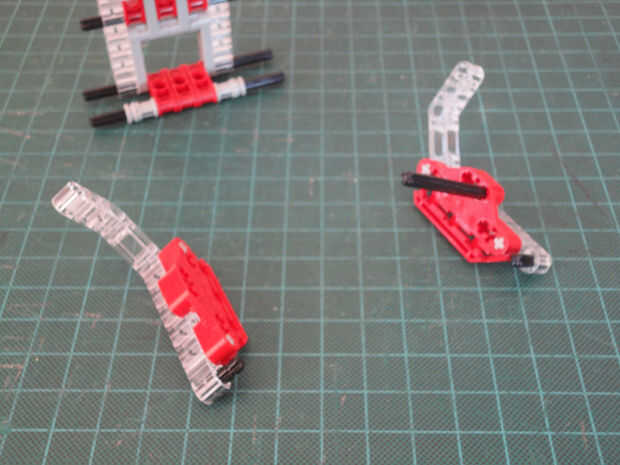

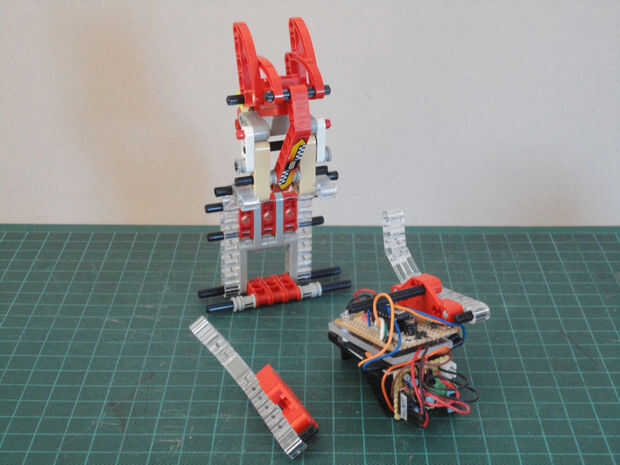
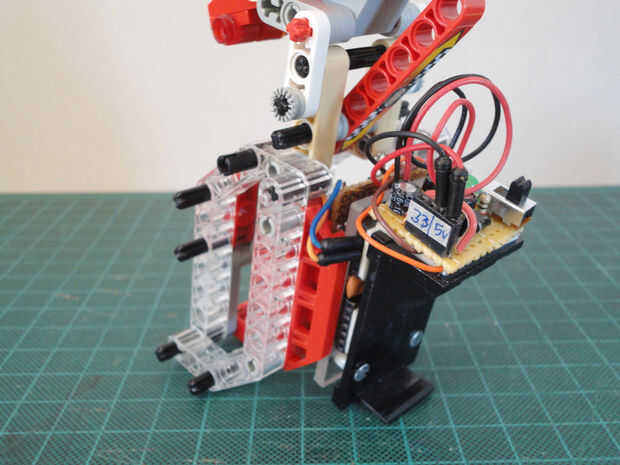
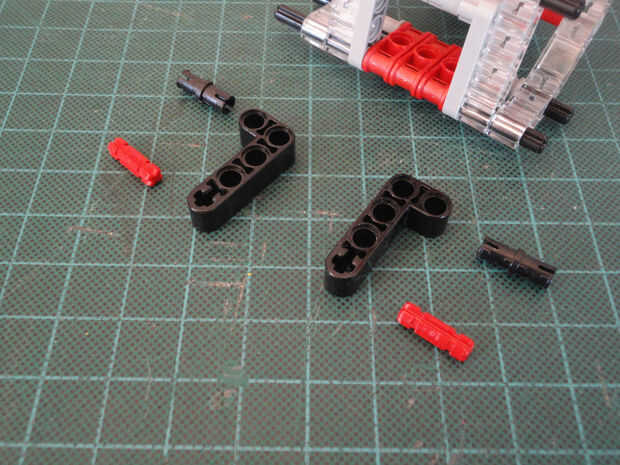
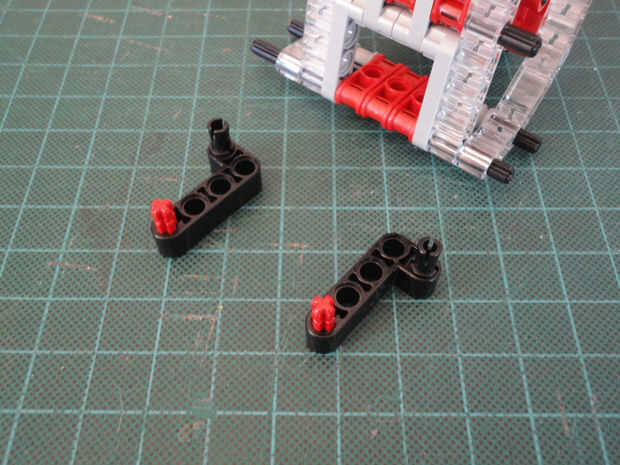
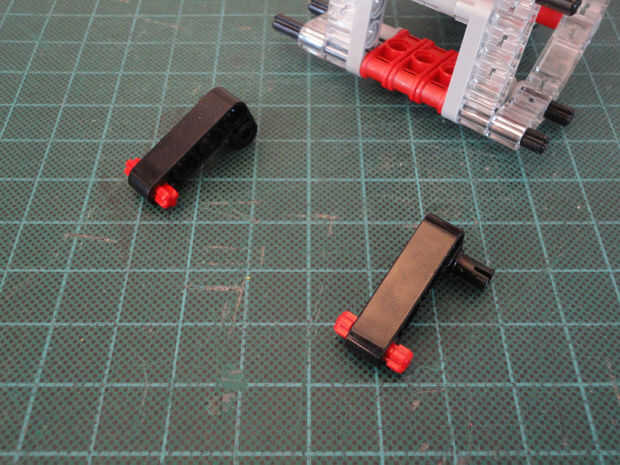
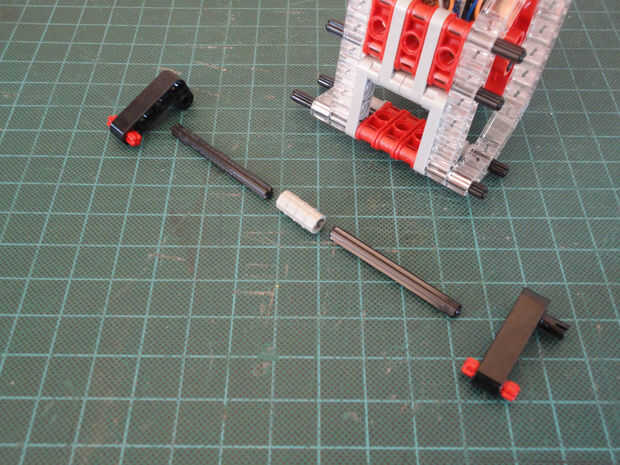
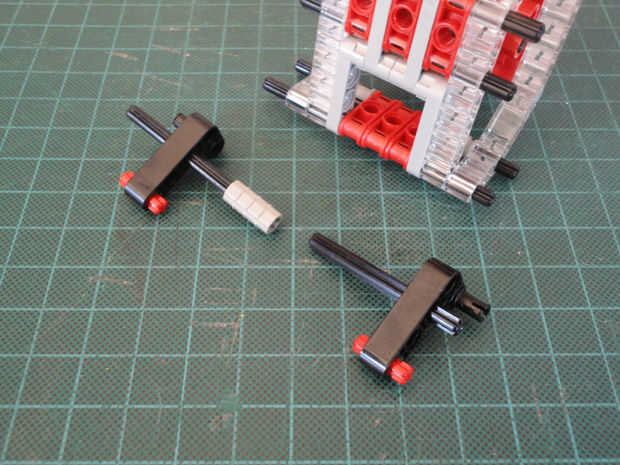
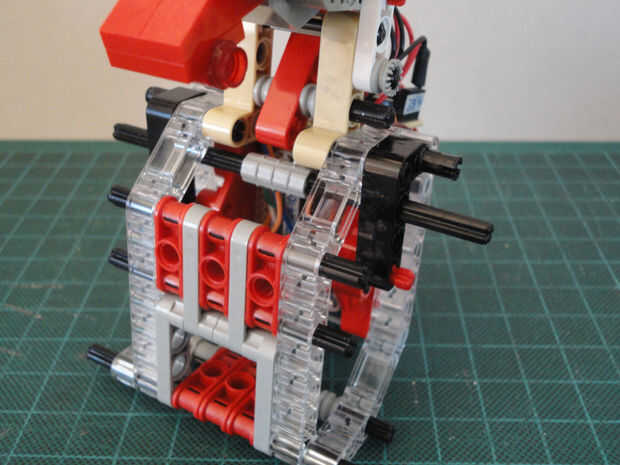
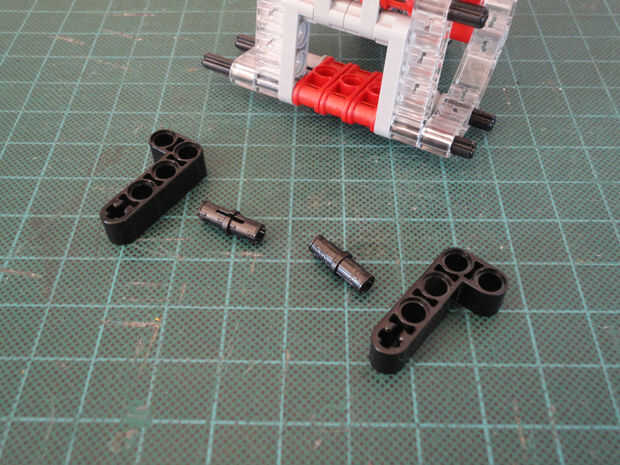
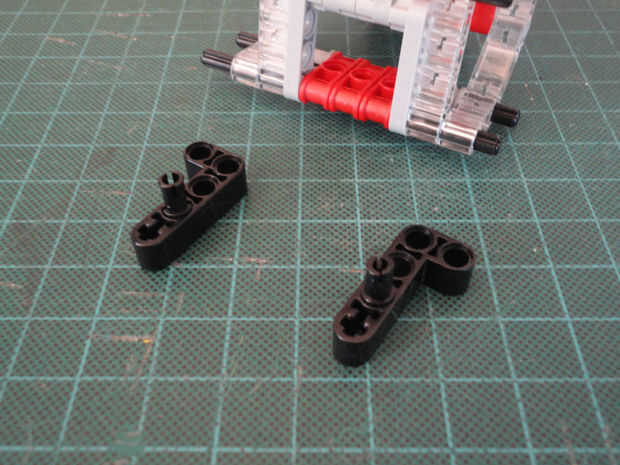
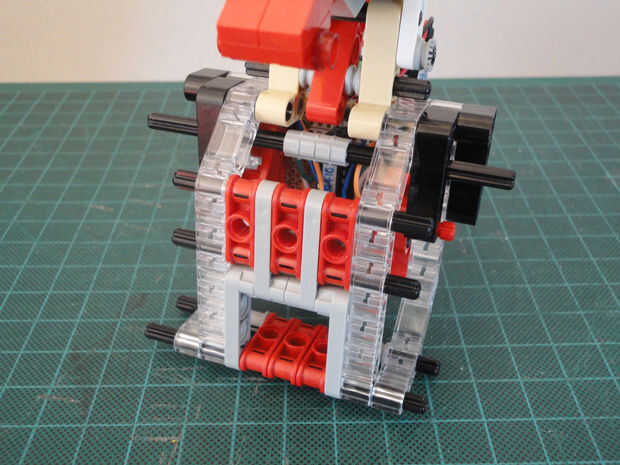
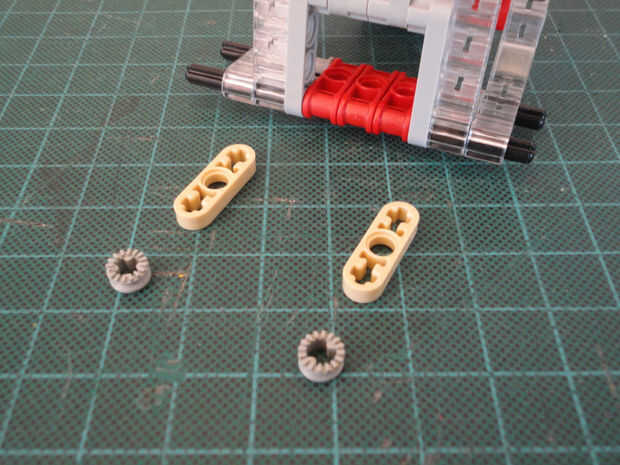
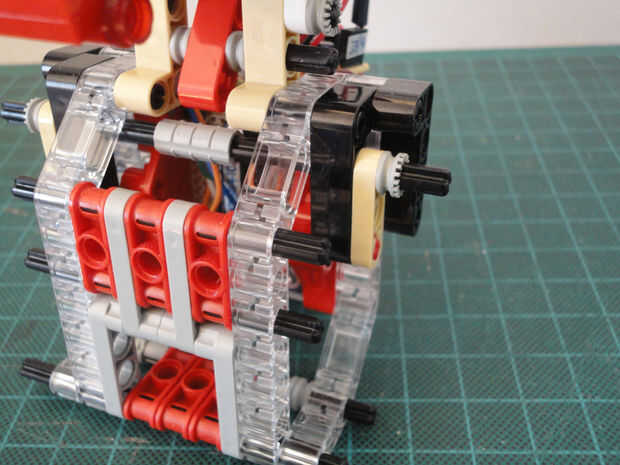
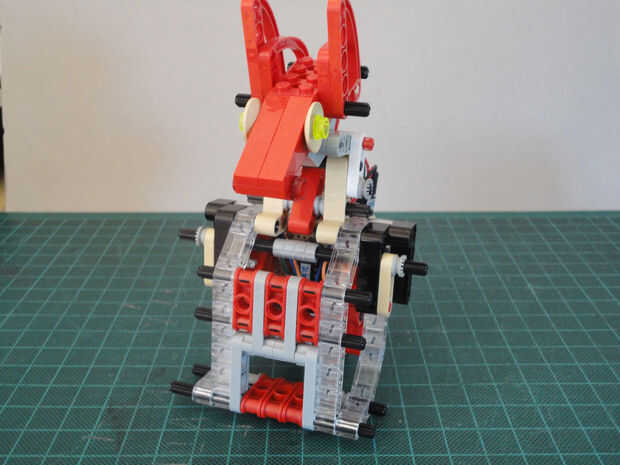
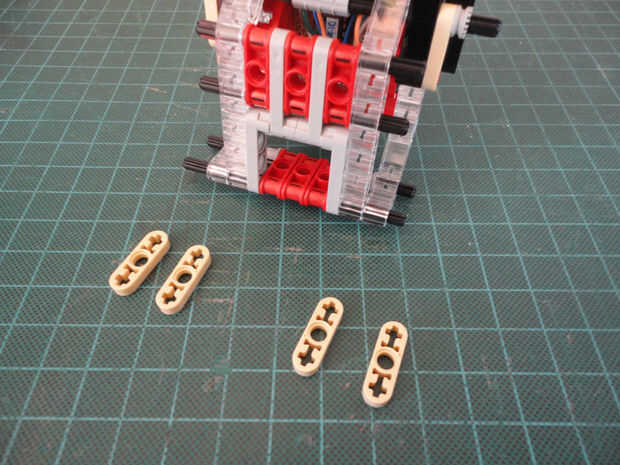
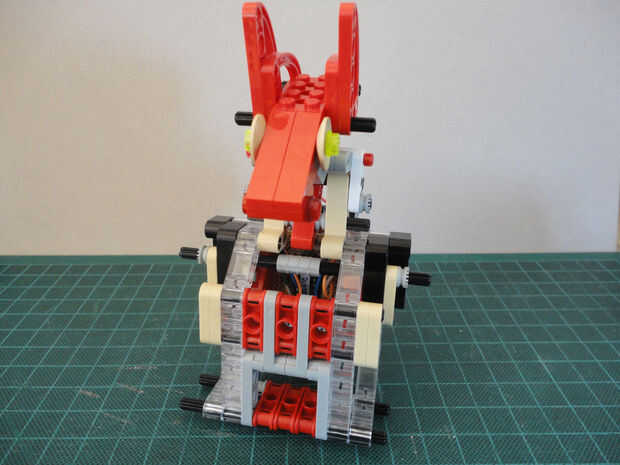
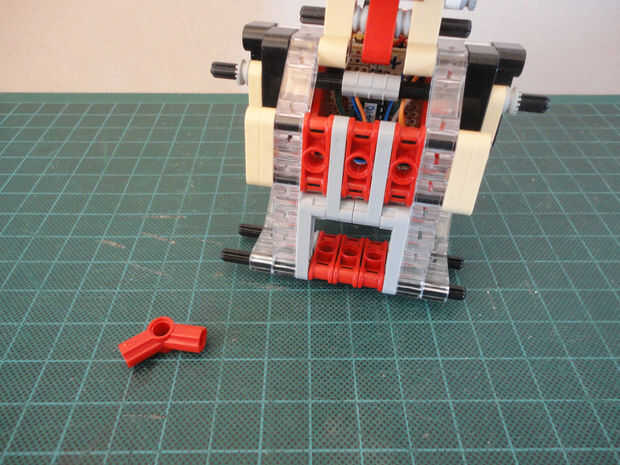
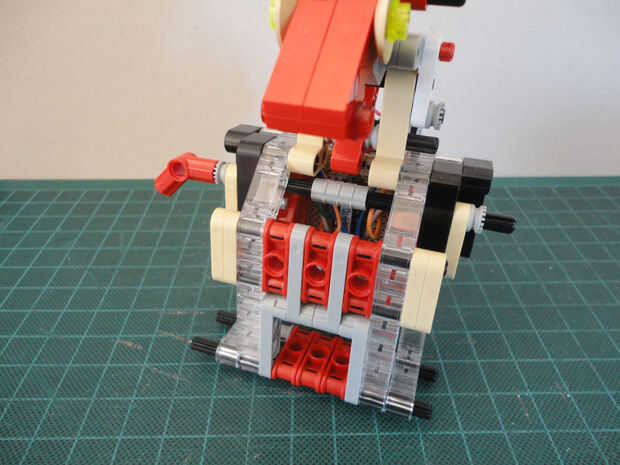
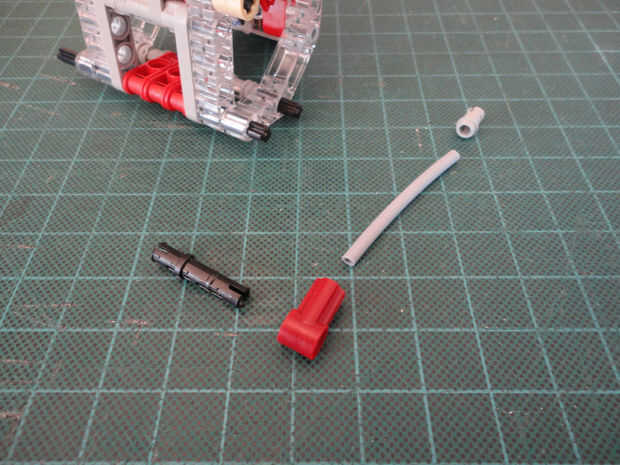
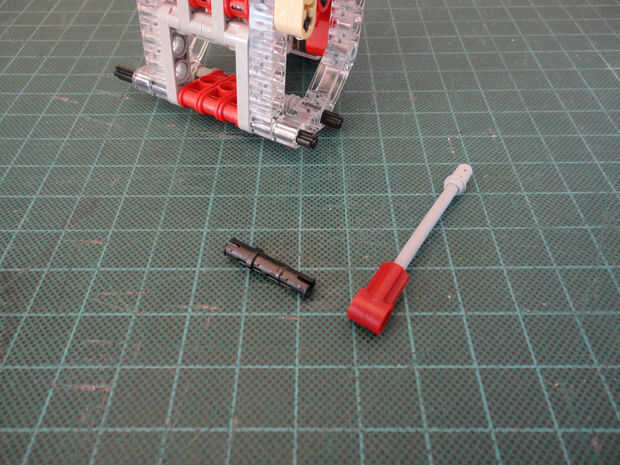
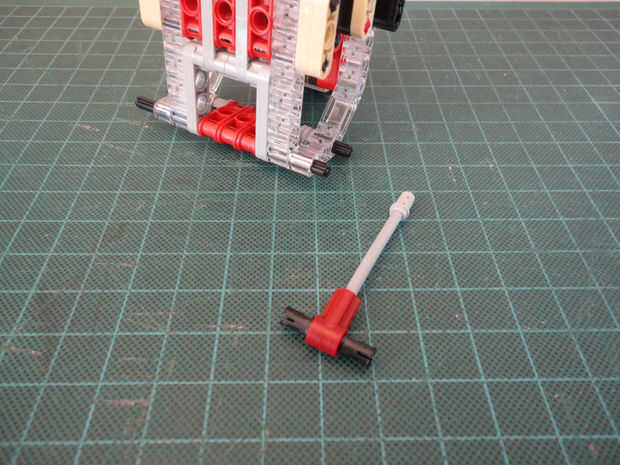
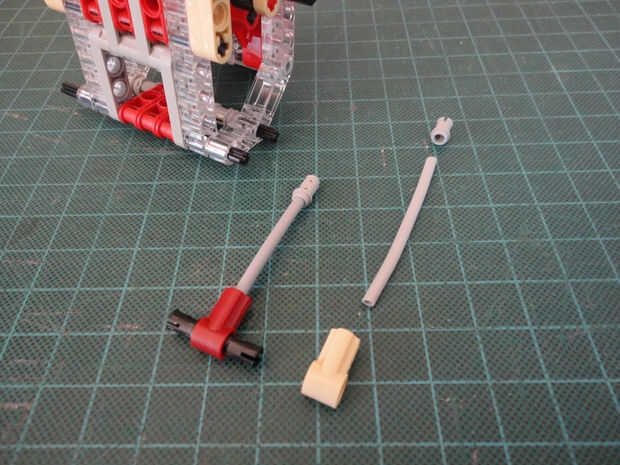
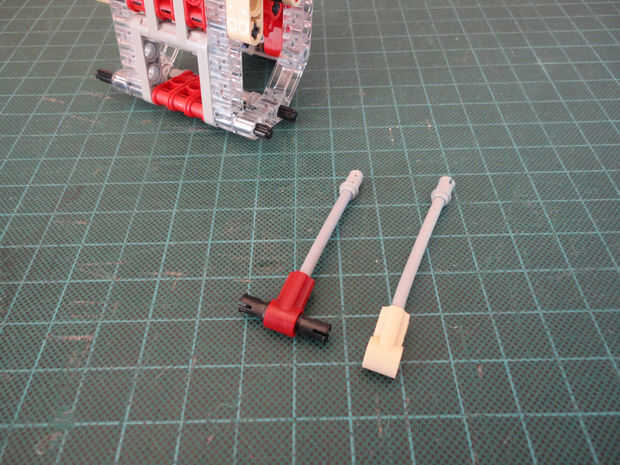
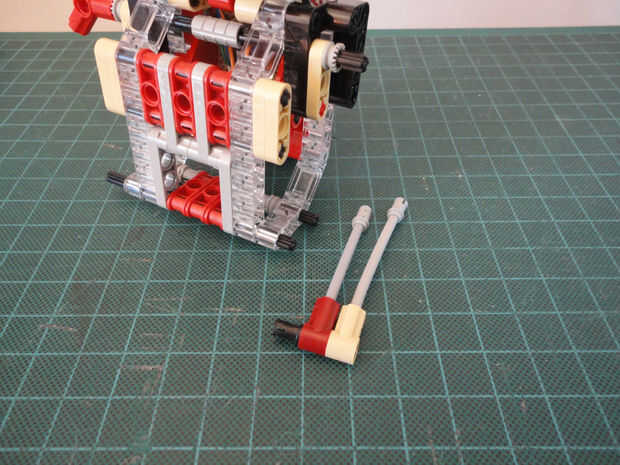
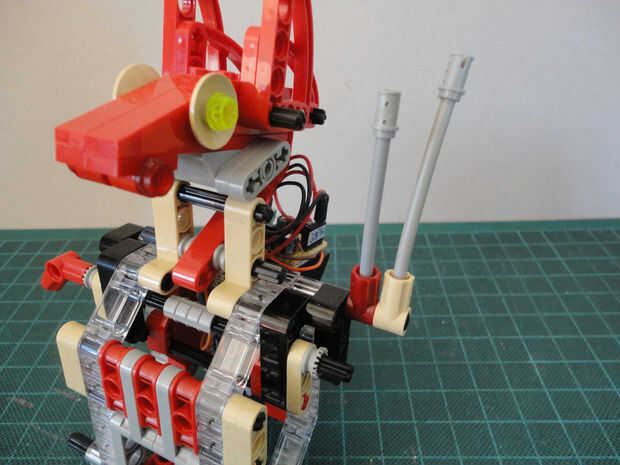
Foto 1, 2, 3 Dos Liftarm 1x11.5 doble doblado espesor (#32009), y dos cruzan eje M 2 con Groove(#32062)
Foto 4, 5, 6 Cuatro ejes de Peg/Cross de conector (#6562) y dos eje conector de bloque de 3 x 6 con los agujeros del eje 6 (#32307)
Foto 7, 8 Cruz de eje M 6 (#3706)
Foto 9, 10, 11 Palma II Arduino
Foto 12, 13, 14 Dos conector Peg con fricción (#2780), eje de cruzar dos M 2 con Groove(#32062) y dos Liftarm forma de L de 2 x 4 (#32140)
Foto 15, 16, 17 Dos cruzan árbol 6M (#3706) y eje Joiner (#6538b)
Foto 18, 19, 20 Dos conector Peg con fricción (#2780) y dos Liftarm forma de L de 2 x 4 (#32140)
Foto 21, 22, 23 Dos palanca técnica (#6632) y los dos Bush técnica dentada de 1/2 tipo II (#4265b)
Foto 24, 25 Cuatro palanca técnica (#6632)
Foto 26, 27 Elemento de ángulo [4], 135 grados (#32192)
Fotos 28, 29, 30 Conector con clavija de 3M (#32556), elemento de ángulo [1], 0 grados (#32013), conector de clavija con la perilla (#4274) y
Tubo rígido de 3 mm de diámetro 7L (#75 c 07)
Foto 31, 32, 33, 34 Ángulo de elemento [1], 0 grados (#32013), conector de clavija con la perilla (#4274) y tubo rígido de 3 mm de diámetro 9L (c# 75 09)







")



")

