Paso 6: PCB Palma Arduino V3 & Motor

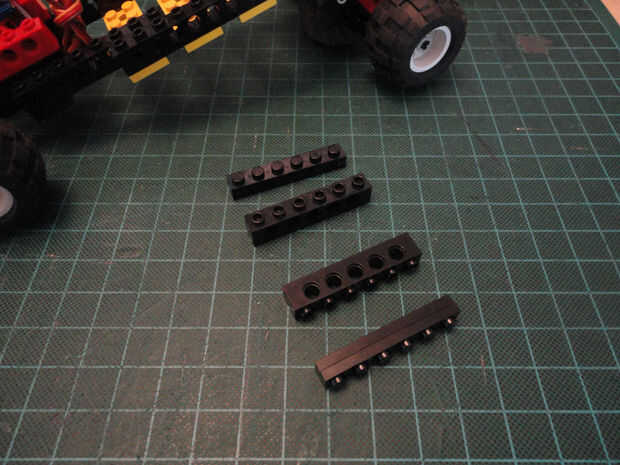
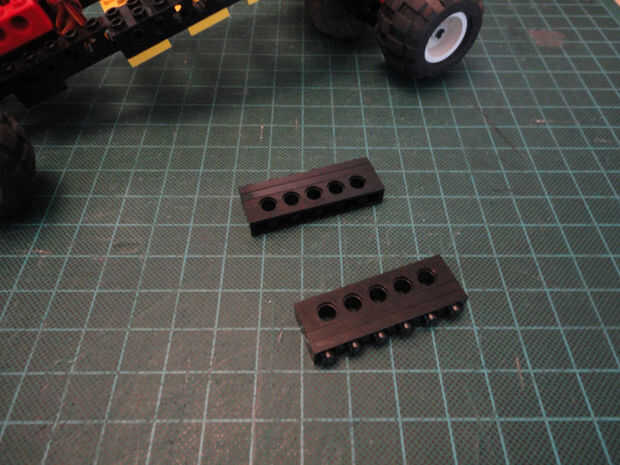
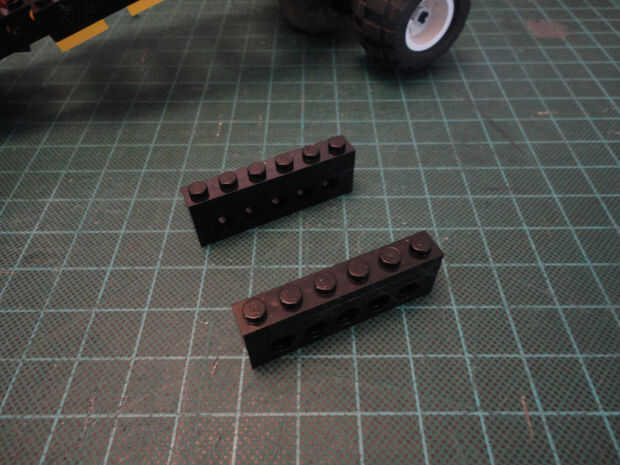
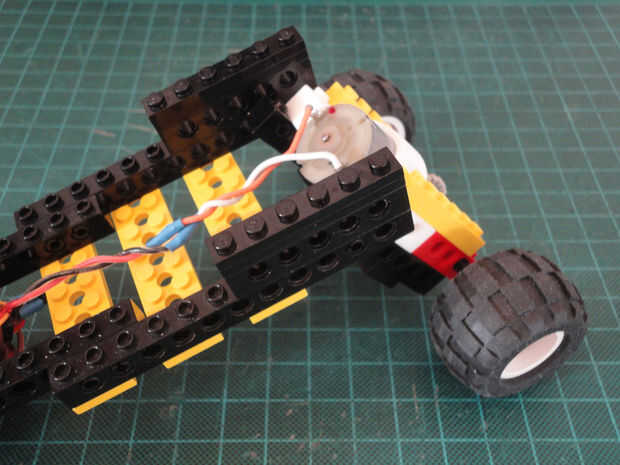
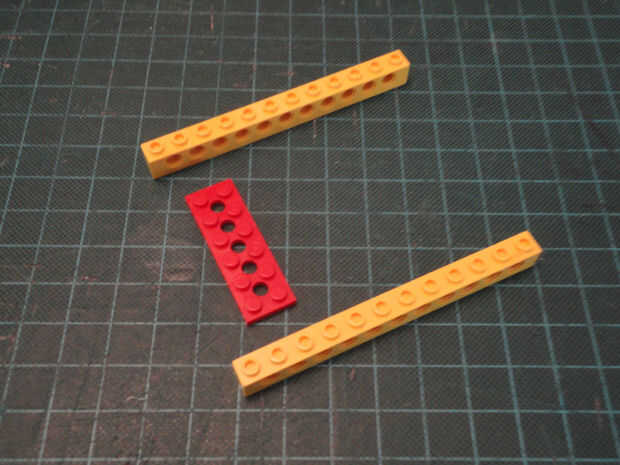

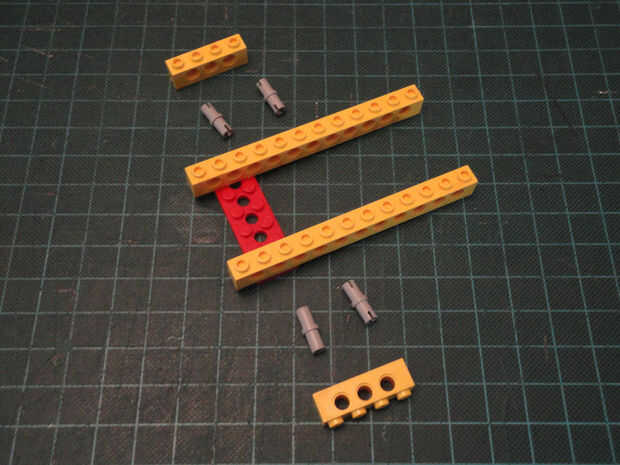
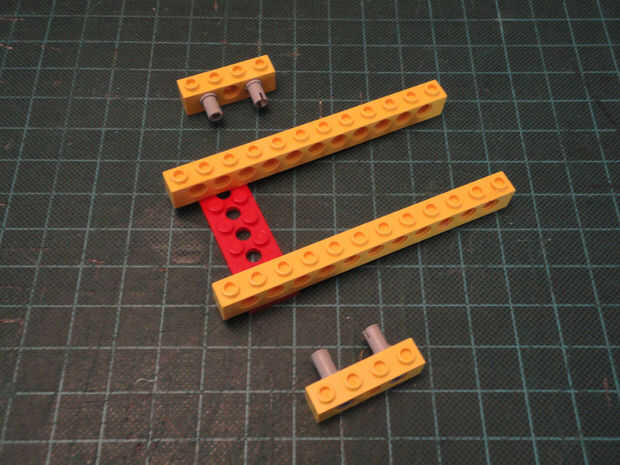
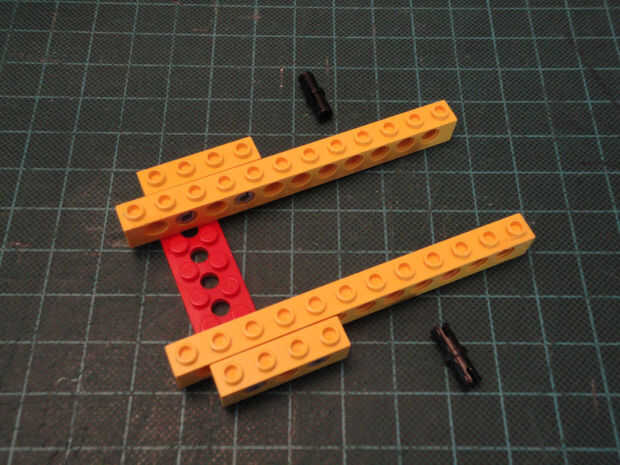
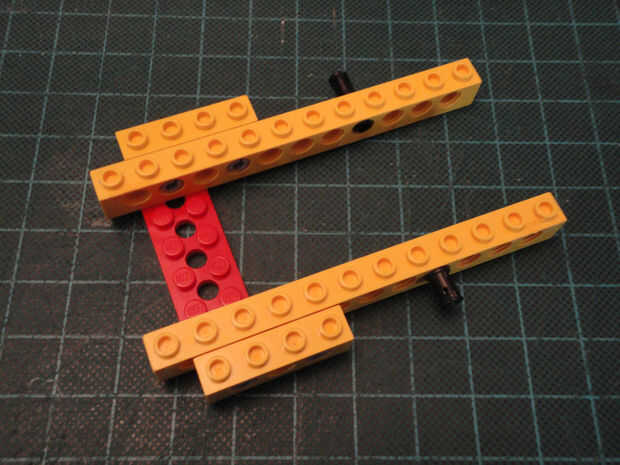
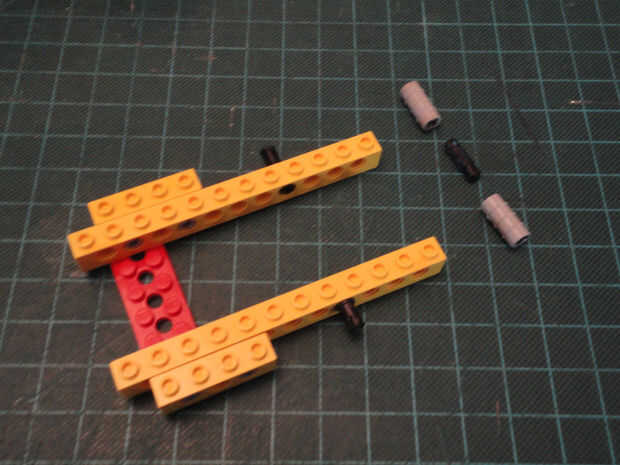
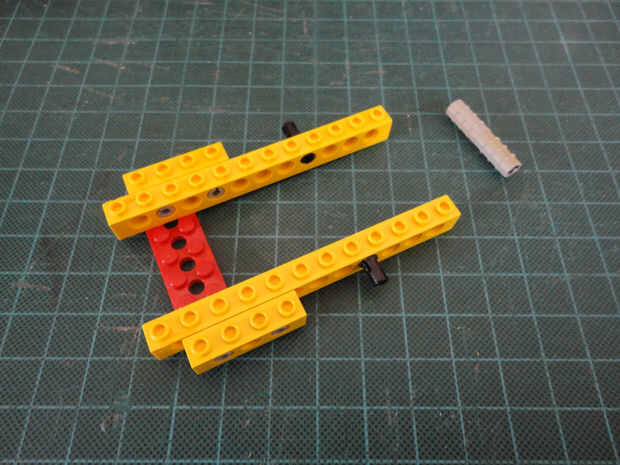
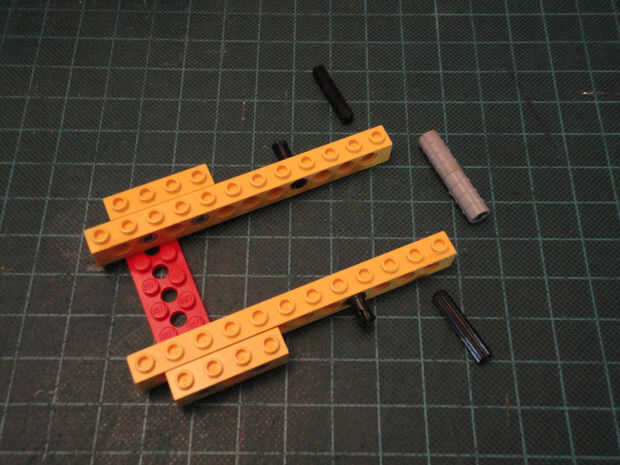
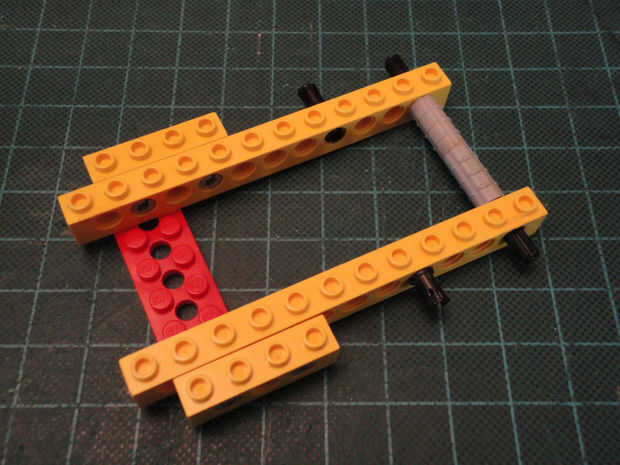
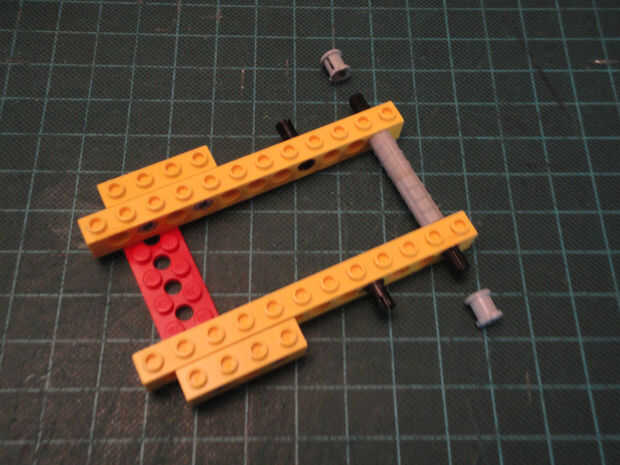
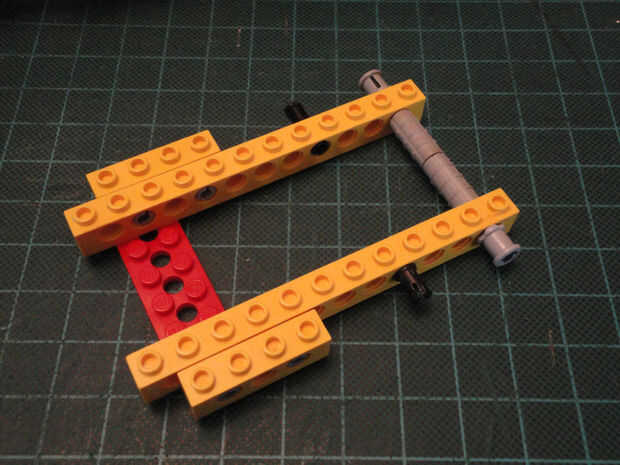
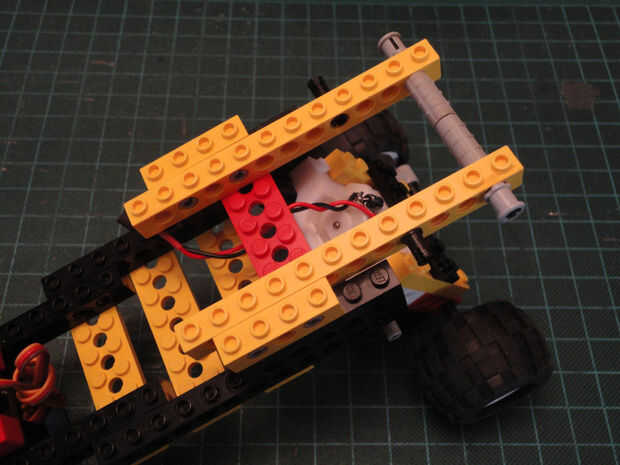

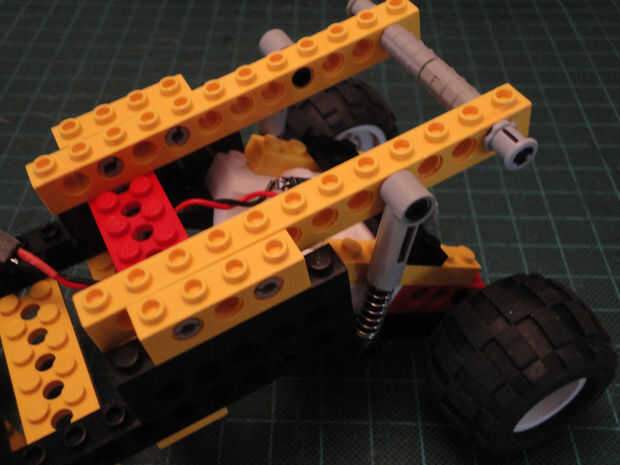
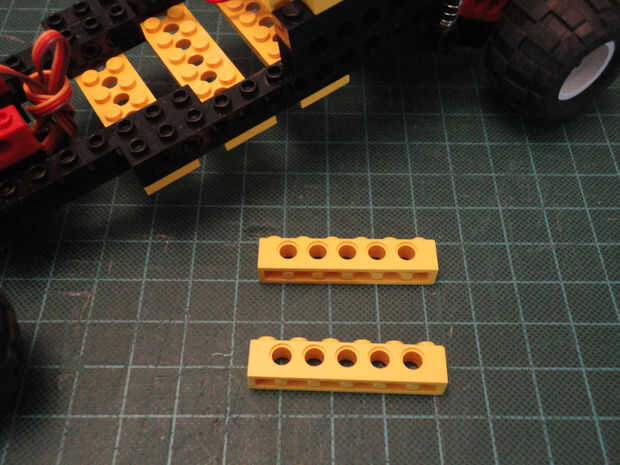
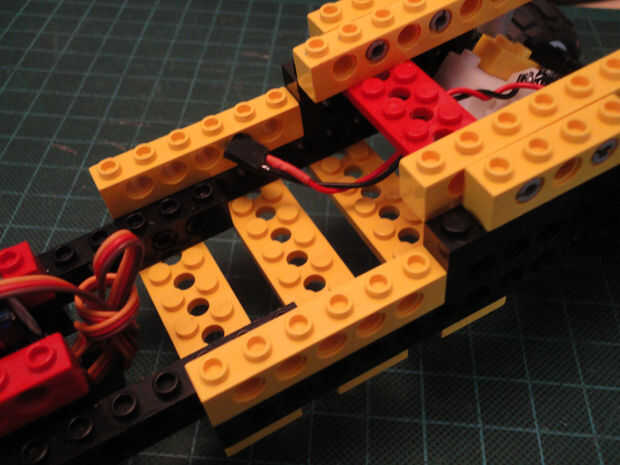
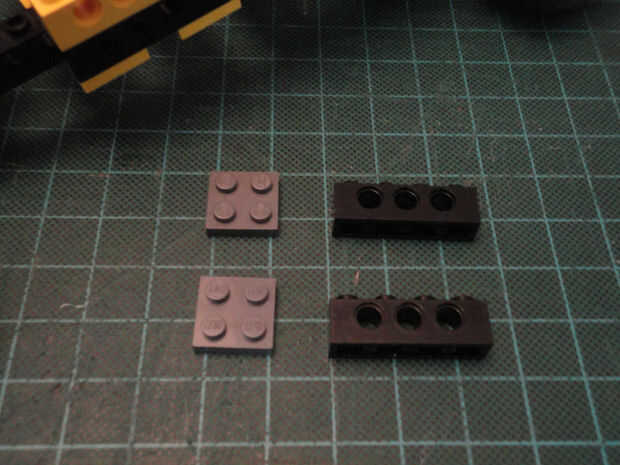
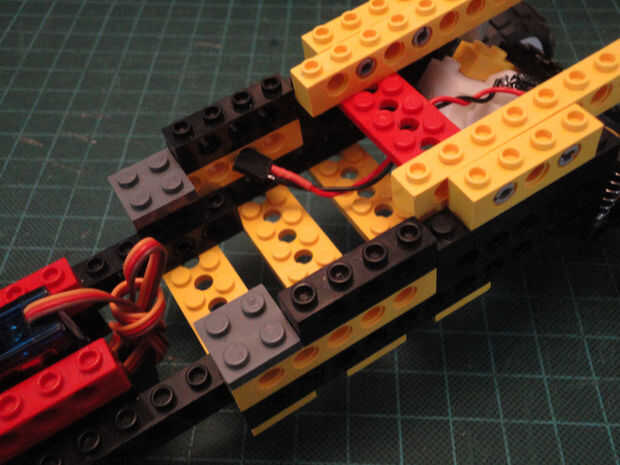

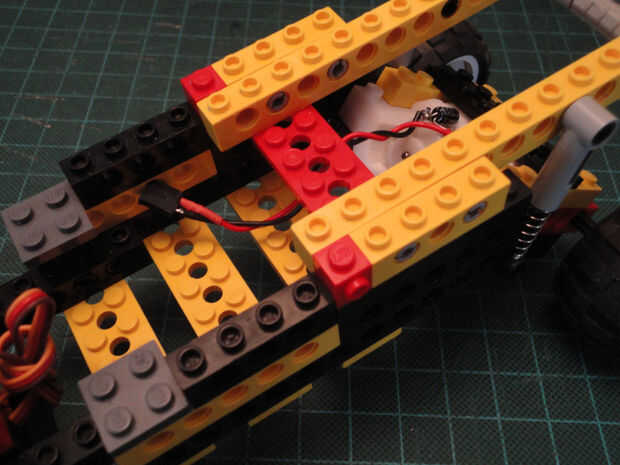
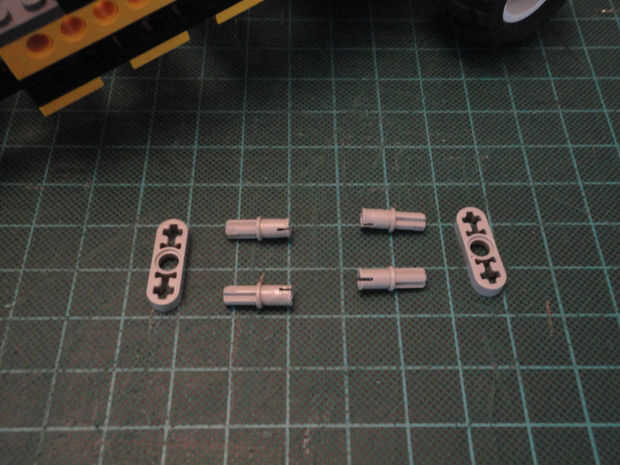
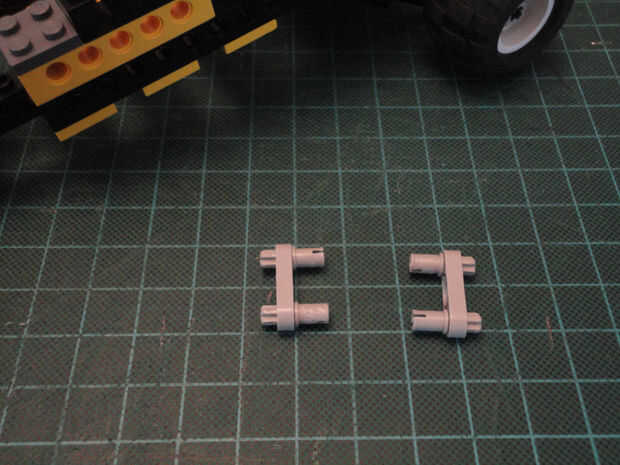

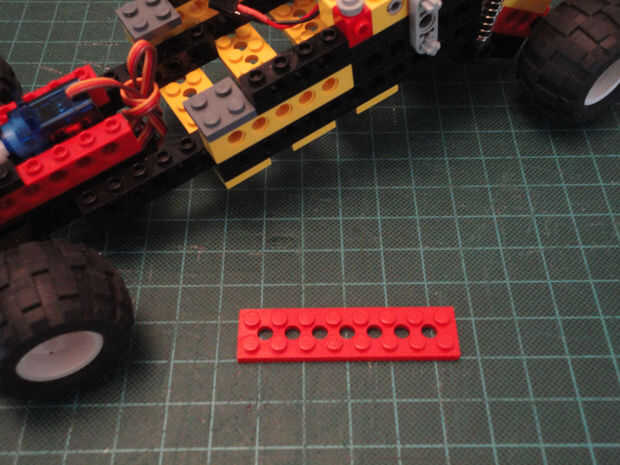
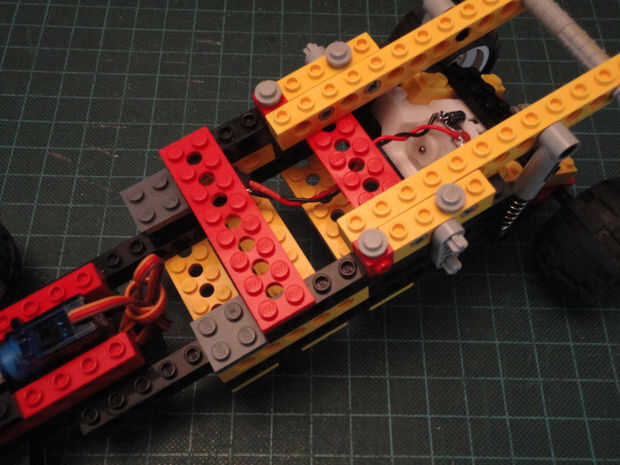


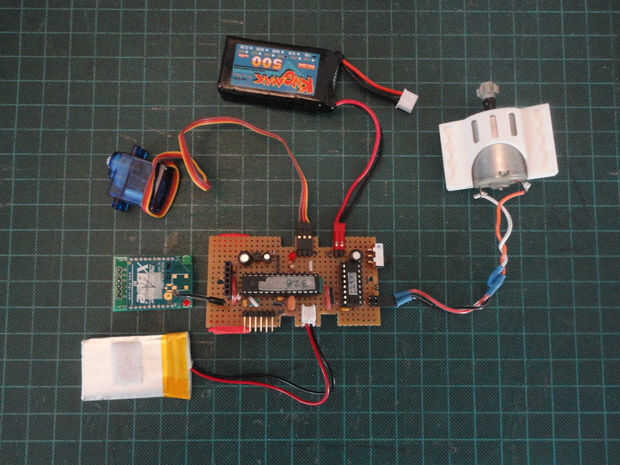

Foto 1 Continúe desde el paso anterior
Foto 2, 3, 4, 5, 6 Dos de 1 x 6 ladrillos Technic (#3894) y 1 x 6 de la placa (#3666)
Foto 7, 8 1 x dos 12 ladrillos Technic (3895) y 2 x 6 placa técnica (#32001)
Foto 9, 10 Cuatro conector Peg con fricción (#2780) y dos de 1 x 4 ladrillos Technic (#3701)
Foto 11, 12 Dos patillas del conector con la fricción (#2780)
Foto 13, 14 Dos ejes Joiner (#6538b) y eje transversal M 2 con ranura (#32062)
Foto 15, 16 Dos cruzan de árbol de 3M (#4519)
Foto 17, 18 Dos del arbusto para la Cruz de ejes (#6590)
Foto 19 La instalación de la Palm Arduino y Base del controlador de Motor.
Foto 20, 21 Dos amortiguadores de 6.5L (c# 731 01)
Foto 22, 23 Dos de 1 x 6 ladrillos Technic (#3894)
Foto 24, 25 Placas de 2 x 2 (#3022) y dos de 1 x 4 ladrillos Technic (#3701)
Foto 26, 27 Dos 1 x 1 ladrillo técnica con 1 perilla (#87087)
Fotos 28, 29, 30 Dos nivel técnica 3M (#6632) y cuatro conector Peg/Cross (#6562)
Foto 31, 32 2 x 8 técnica de la placa (#3738)
Foto 33, 34 1 x cuatro 1 redondos placas (#6141)
Foto 35 Esta foto muestra el conexionado de Arduino y la PCB del controlador de Motor y el motor, 3.7V batería para módulo Arduino XBee, Servo y 7.4V batería para el motor. En el PCB hay regulador de 5V para la alimentación del Servo.












