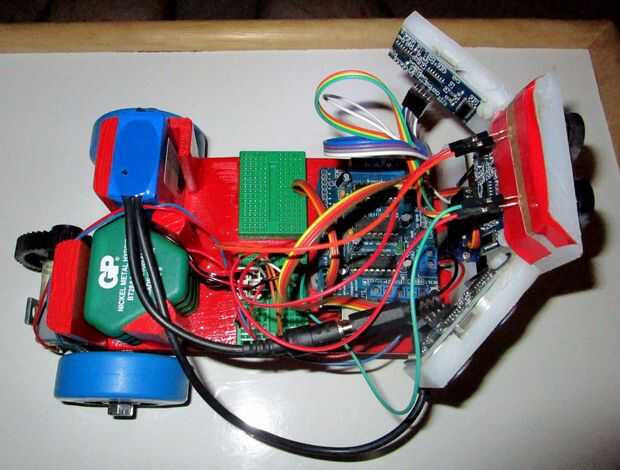
Mi primer robot! Construí este desde cero, diseño de la plataforma, sistema de tracción, sensor de matriz y la programación. He diseñado con la idea de que sería una plataforma flexible para experimentar con y para poder añadir accesorios, como los faros de LED azul, que es lo que el pequeño verde breadboards son para. Tiene espacio para dos baterías - un 12v 1800mAh que impulsa el motor y la placa Arduino a través de la pantalla de control del motor; y una serie de cuatro 3.6v 280mAh sobra pilas de celular que encontré en línea puede realizar en serie o en paralelo como su demanda de requisitos de energía. En este ejemplo están en dos grupos en paralelo de dos pilas en serie que las linternas.
Arduino, protector de motor, batería y varias piezas menores fueron compradas en E-Bay. El motor, engranajes, etc., eran sólo piezas de mi garaje rescatado de toda clase de dispositivos electro-mechnical largo de los años. Y las ruedas y algunas otras piezas de trajes de sobra como ciencia y superávit ( http://www.sciplus.com/ ).
Bien, suficiente introducción. Vamos a llegar a algunos de los detalles de cómo construí esto.

")




")






