Paso 3: El tren de la impulsión
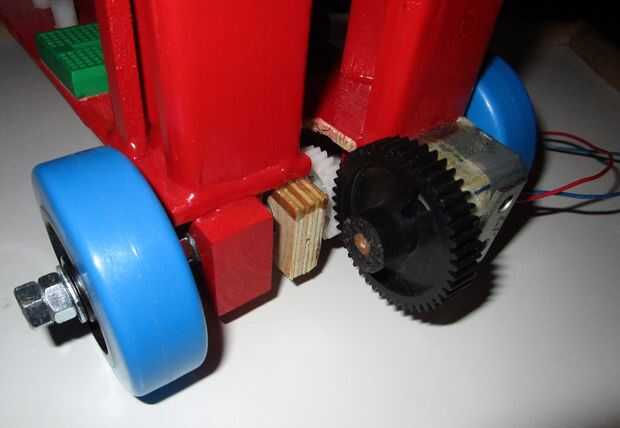

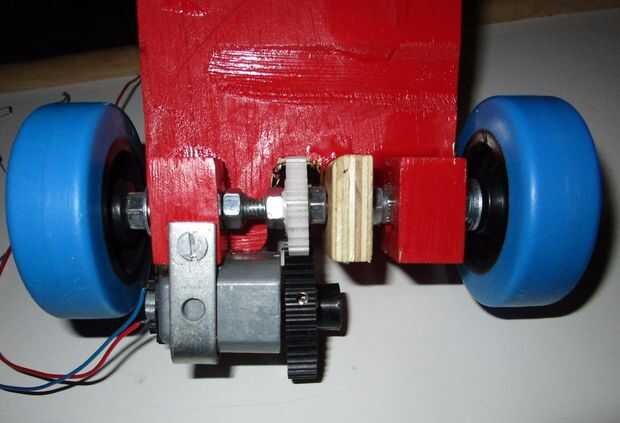
El tren de la impulsión consiste en un motor de engranaje de Buehler de 12v que se adjunta a la parte trasera del robot utilizando un soporte en L. Os adjunto el soporte en L al cuerpo del robot para que el motor se deslizó firmemente entre el cuerpo y hacia arriba el frente brazo del soporte. A continuación os pongo algunos epoxi a lo largo de la costura donde el motor había tocado el cuerpo, y que lo mantiene firmemente en su lugar. Hay un gran engranaje en el eje del motor que las mallas con un engranaje más pequeño en el eje de la rueda para que cuando el motor gira, conduce la rueda. Hay varios bloques de madera atados al cuerpo que el eje pasa por darle estabilidad y mantener en su lugar.
Esta parte fue definitivamente una experiencia de aprendizaje. Mi primer intento fue con un eje sólido que une a ambas ruedas, pero el robot no gire muy bien debido a que las ruedas necesitan viajar a diferentes velocidades para el robot activar con eficacia. Pero por supuesto esto no puede suceder si están atados en el mismo eje sólido. Entonces que aserrado del árbol por la mitad para que el motor sólo gira una rueda y la otra rueda es libre de girar a cualquier velocidad necesita. Esto funciona mucho mejor! Pero tuve que añadir otro bloque de apoyo para mantener cada mitad del eje constante y seguro.
Las ruedas son sólo algunos 2-1/2" duros ruedas de plástico recogido superávit porque me gustó el color.

")




")






