Paso 4: La matriz del Sensor

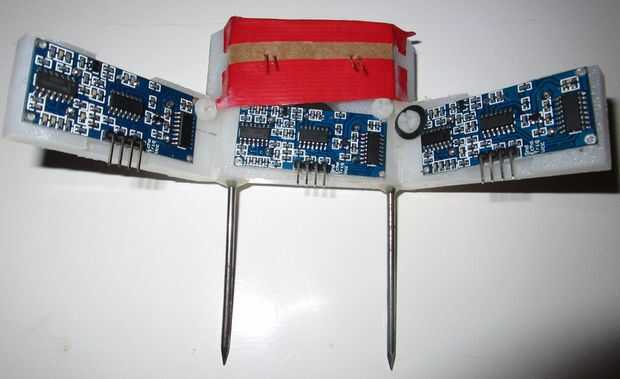
R3 es un robot de evitación del obstáculo que utiliza un conjunto de tres sensores de ultrasonidos para interactuar con su medio ambiente. Al principio sólo usé un sensor apuntado hacia adelante, pero encontró que el ángulo de visión del sensor es bastante pequeño. El robot haría bien si vino en algo en la cabeza, pero si vino en un obstáculo en ángulo, no verlo y funcionaría en él. Así que hice una matriz de tres sensores, uno apuntando hacia adelante y uno en cada lado hacia fuera en un ángulo de 45 grados. Así el robot puede "ver" las cosas se acerca desde un ángulo a cada lado.
Hice la matriz fuera más viejo polietileno corte tablero de alta densidad y ajustaron las piezas juntas para formar los ángulos de 45 grados a los lados. La pieza media, también me dio el robot algunas linternas. Tenía dos lentes de escáneres antiguos que taladré agujeros para sobre el sensor de ultrasonidos. Detrás de estas coloqué algunos azul LED sostenido por un trozo de cartón y algunos cinta roja. Los cables de los LED sólo asoman a través de la cartulina en la espalda.
También perforé algunos pequeños agujeros en la parte inferior de la pieza central de soportes colocar al robot. Para los soportes, I solo había usado un par de clavos grandes, cortó las cabezas y luego los ajustaron en los agujeros. El extremo puntiagudo del clavo ahora las diapositivas en un agujero en los bloques del servo dirección montada sobre. Esto permite flexibilidad para quitar y volver a configurar la matriz de Señor, o reemplazarlo con algo totalmente diferente.

")




")






