Paso 5: montaje
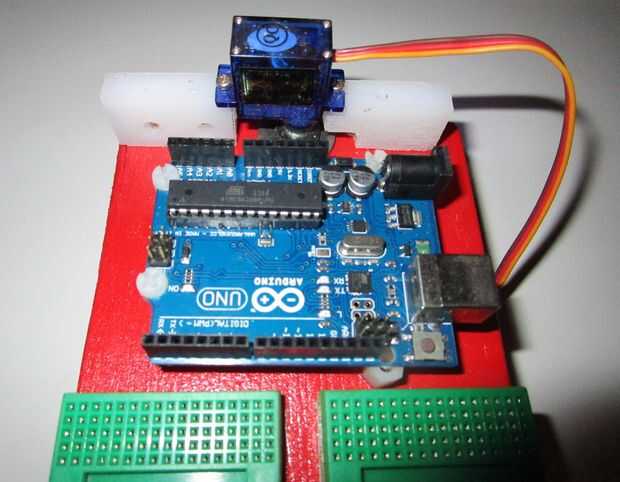
El resto de la Asamblea es bastante recta hacia adelante y sigue el esquema de Fritzing que di al principio. La placa Arduino Uno va en primer lugar, unida a los postes de nylon roscados con algunos tornillos de nylon correspondiente. Los tornillos fueron siempre tan levemente demasiado grande para los orificios de la placa de Arduino, así que tomó una broca un poco más grande que los agujeros y escarió hacia fuera un poco. A continuación, los tornillos de ajuste fino.
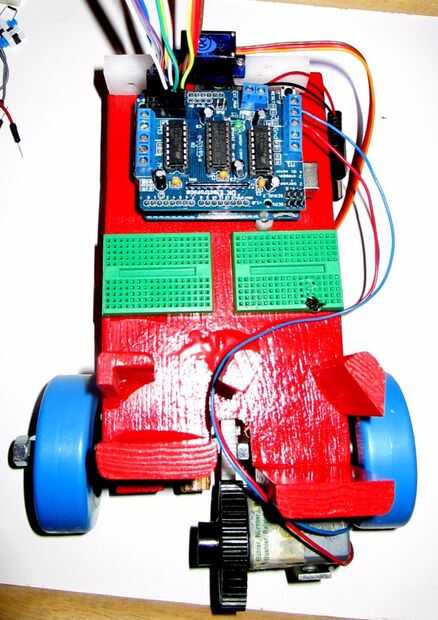
De eso va el motor control de shield, que por supuesto sólo en el Arduino a bordo de sí mismo. En la esquina del escudo del motor que corresponde a la esquina de la placa de Arduino, donde están los pines analógicos, hay tres filas de 6 agujeros. Una fila es + 5v, es una fila y una fila corresponde a los pines analógicos en el Arduino. He utilizado éstos para sensores ultrasónicos. Yo soldado 6 cabeceras de hembra de pin en cada fila para hacer más fácil de usar sólo los cables de puente para conectar los sensores. Cada sensor tiene uno + 5v pin, pin de una tierra y datos entonces dos alfileres, un disparador enviar el ultrasónico "ping" y que sigue la pista del eco que regresa. Así que con tres sensores y dos datos pernos cada, usé hasta los 6 terminales analógicos. Por supuesto puede usar esos pines como pines digitales sólo por configurándolos correctamente en el software, que es lo que hice. La pantalla de control del motor requiere es fuente de energía propia, especialmente si se está ejecutando un motor de 12v como soy, ya que la placa Arduino no ponga que el mucho voltaje. Os adjunto un enchufe macho de barril C.C. con una colita de cerdo a los terminales de tornillo de alimentación en el escudo del motor ya que es lo que interfaz más fácilmente con la batería que tenía. Y los cables del motor de 12 v a los terminales de tornillo motor; en mi caso usé los terminales del motor 2. El escudo va a conducir hasta 4 motores.
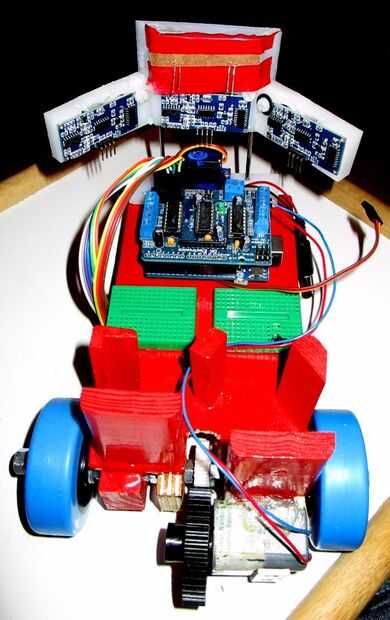
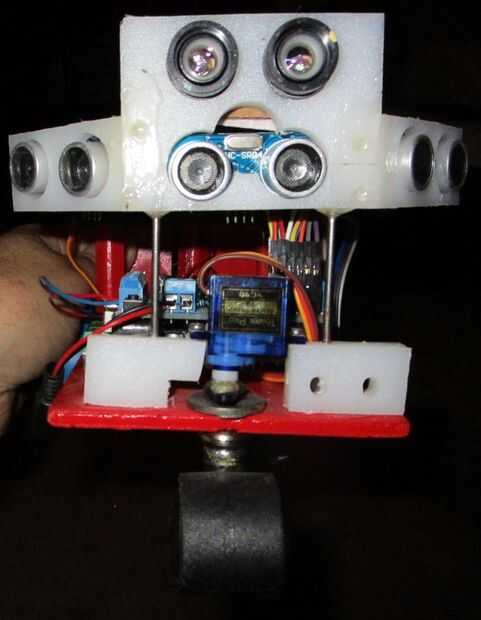
La matriz del sensor entonces las diapositivas en usando los agujeros y el montaje "clavos" que se ha descrito anteriormente. Entonces todos los cables van en para los sensores. Los sensores ultrasónicos tienen pines macho, usé los cables de puente con un conector hembra para conectar el sensor y un extremo macho para sujetar al escudo del motor. Además de los terminales de tornillo motor 4, el escudo del motor también tiene dos juegos de tres pernos masculinos que son servomotores. Había enchufado los cables para mi servo dirección los pines correspondientes a servo 1 en el escudo del motor.
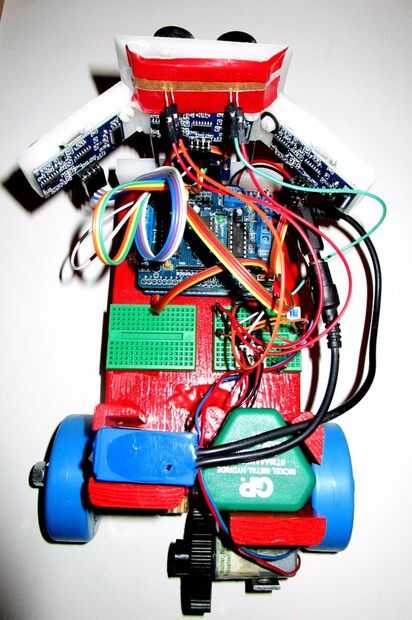
Las baterías fueron el siguiente. La batería azul en la foto tiene dos conductores en él - un tapón del cañón hombre que entró en el enchufe de alimentación de Arduino; y un conector de barril femenino que el tapón del cañón macho que conectado a los terminales de alimentación en el escudo del motor. La batería también tiene un interruptor construido justo en, una vez que conecto todo para arriba, yo solo use ese conmutador para encender y apagar el robot. Las pilas verdes, áspero triangulares son las baterías de celular excedentes. Tengo estos dispuestos aquí para que dos de ellos están en serie, y luego los dos conjuntos están en paralelo. Así tengo un 7.2v batería 560mAh que utilizo para alimentar mis dos linternas de LED. Todo esto está conectado en uno de los pequeños breadboards verdes, incluyendo un interruptor para encender y apagar los faros. La tensión es bastante maldito cerca de lo que debe ser para estos LED especiales, así que no molestan con cualquier resistencias y funciona muy bien. Os he adjunto otro diagrama de Fritzing para los faros para que pueda obtener una mejor idea de cómo lo hice.

")




")






