Paso 1: Construir el Hardware
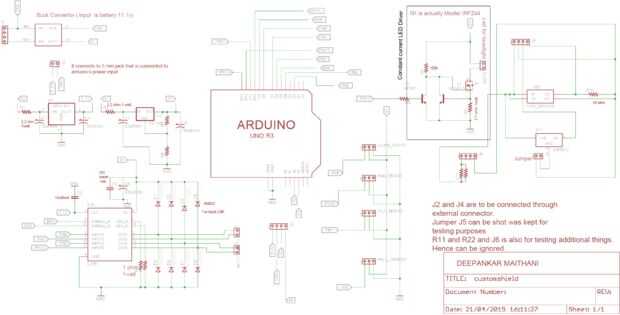
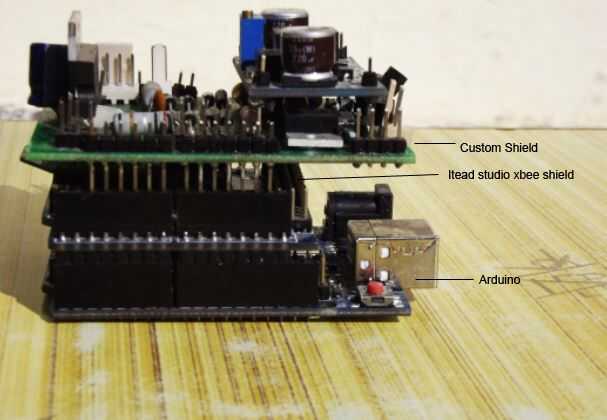


Un Consejo es necesario para conectar todos los componentes como el conductor del motor, sensores, servos, conductor del LED con arduino y distribuir la energía a ellas. El esquema a continuación muestra todas las conexiones. Debido a las limitaciones de espacio no podría construir el convertidor buck en mi tablero. Para los que no saben un buck converter es un circuito utilizado para soltar tensión de alto valor a valor bajo. Usaba una batería V 11.1 pero mis motores clasificaron para 9V. el servo necesita 6V y controlador de motor y conductor del LED (para proyectores) y sensores necesitan 5v. Por lo que cayó primero el voltaje de 11.1 a 9v y luego este v 9 está convertido a diferentes voltajes según sea necesario utilizando reguladores adj III7 LM y Lm1117. La selección de los componentes es crucial aquí. Alguien puede pensar que por qué no uso un regulador del trazador de líneas en lugar de convertidor buck pero aquí el requisito de potencia y el linar regulador como IC7809 freír hasta. Este no es el mejor coz de diseño de PCB que tenía algunos componentes y restricciones de fabricación. Espera de si alguien podía mejorar.
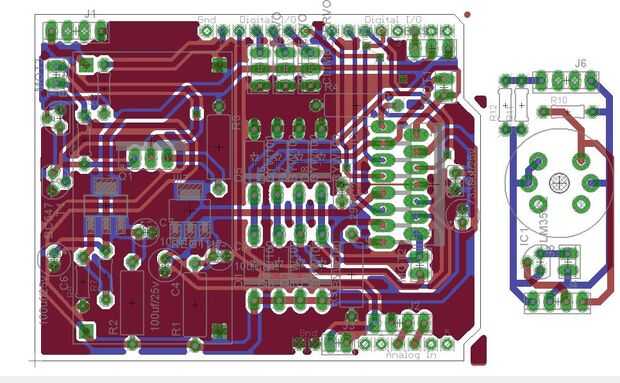
A continuación se recogen los archivos y Gerber. Sólo puede imprimir el tablero y disfruta. Este diseño está probado y probado.
EXPLICACIÓN ADICIONAL
Esta sección explica el funcionamiento del LED y conductor del Motor circuito del conductor si no has trabajado con tales circuitos antes.
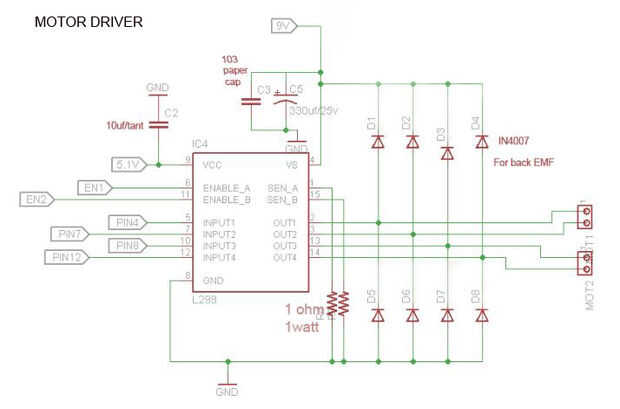
CONTROLADOR DE MOTOR
El conductor del motor utilizado es L298 puede proporcionar el voltaje hasta que ~ 40v y la corriente de 2A. Otra opción más barata puede ser l293D que es más barato pero funciona a especificaciones inferiores.
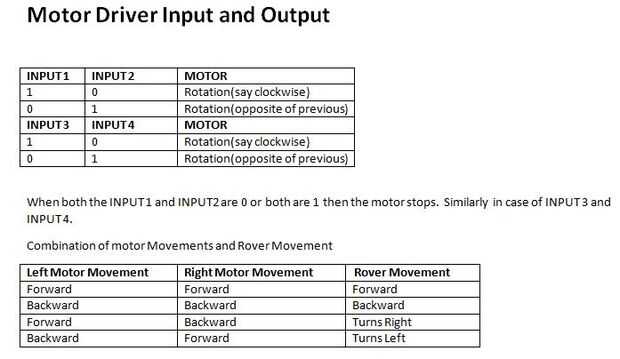
Se refieren a la imagen de conductor del motor y el Motor controlador entrada salida carta al leer esta sección:
Si es alta entrada 1 y entrada 2 es baja el motor girará en una dirección mientras que si entrada 1 y entrada 2 es alta girará en dirección contraria. del mismo modo para la entrada 3 y entrada 4. Entrada 1 y entrada 2 son para controlar 1 motor y entrada 3 y 4 entrada de control de motor 2
Las patillas EN1 y EN2 deben ser alta para los dos canales motor activo si cualquiera de estos es baja las respectivas salidas motor salida 1 y Output2 o salida 3 y 4 de salida no funcionará independientemente de las entradas en INPUT1, entrada2, INPUT3, INPUT4.
También las patillas SEN_A y SEN_B deben conectarse a tierra mediante una resistencia de valor apropiado, como se muestra. Los diodos se utilizan para detener el emf trasera que se genera cuando los motores giran. Los condensadores son para proporcionar voltaje de entrada limpiado.
VCC(Pin9) es el voltaje necesitado por la IC para su operación y lógica. Vs (Pin 4) es la tensión a la que usted quiere hacer funcionar los motores.
CONDUCTOR DEL LED
En este diseño se implementa un conductor actual constante del LED a la corriente el LED para cabeza de la lámpara. Esta configuración de diseño da mucho mejor rendimiento en comparación con simplemente conectar el LED al poder. La resistencia R3 determina la cantidad de corriente que pasará por el LED. Lo que da la flexibilidad necesaria para ajustar la intensidad según su necesidad de cambiar el valor de R3. Cuando el valor de la corriente tiende a aumentar la gota a través de la R3 se enciende el transistor T1 así de puesta a tierra extra actual. El transistor T2 está apagado a través del pin 13 de arduino. Cuando T2 es el faro estará apagado. Cuando T2 será apagado el faro será ON.
Descargar los archivos de tablero de águila y Gerbers. CustomShieldBoardFiles
Sería genial si pudiera en la remezcla/mejora podría atttribution proporcionar un enlace en los comentarios para el uso de la misma













