


Hola. No tengo mucho picts al construir este robot 2003, pero algunos i encontrado que voy a compartir aquí
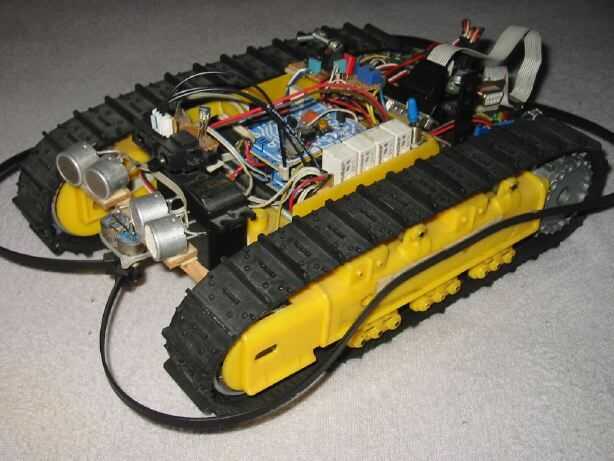
Sobre Ramses: El chasis del robot basado en un juguete de rc de caterpillar. Reemplacé los motores de la C.C. para las pistas con 2 servos de rotación continuadas (buscar hack servo). 2 resistencias LDR montan en un 90° servo permite lugares del hallazgo brillante u oscuro. El sensor de distancia Analógico Sharp podría medidas de distancias. En caso de un error con el sharp o / y mi bosquejo 4 de entradas analógicas (ver: ...) detectar 8 posibilidades de colisión en el robot. Un micrófono fue lissen aplausos y establecer diferentes comportamientos para el robot. El software fue escrito en Basic y compilado para la uC c-control (esto era en mis tiempos de pre arduino). Las cosas de la gama ultrasónica, nunca funcionaron. ;-)
Lamentablemente, un incendio destruye ramses y la mayor parte de mi otro trabajo
")






 Stage1Model2")

")
")
 /w Arduino")
")
