Paso 7: Software

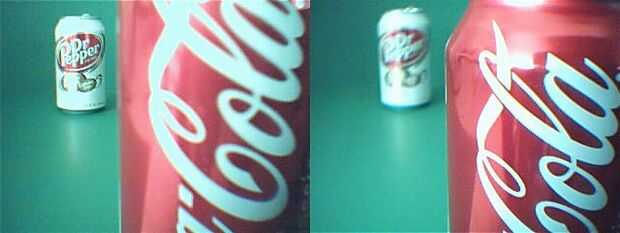




Las imágenes de abajo muestran las dos imágenes de la cámara como miran hacia fuera hacia una coca cola pueden y un DrPepper puede. Puedes ver la diferencia de focal entre las dos imágenes y también la disparidad vertical entre las dos cámaras a pesar de ser montados muy cerca uno del otro. Esta disparidad puede reducirse usando un prisma para dividir una vista única en dos puntos de vista de dos cámaras, pero encontramos el método rápido de usar dos webcams cerca uno del otro a ser suficiente.
Nota en el lado izquierdo de la imagen final coque puede está fuera de foco y DrPepper lejos puede está en foco. En la imagen de la derecha, la situación es inversa. Si nos fijamos en los bordes de esta imagen que se puede ver los puntos fuertes de borde reflejan el enfoque del objeto. Las líneas blancas de la señal una transición borde superior que significa el objeto es más enfocada. Las líneas azules señal de una respuesta más débil.
Cada imagen se divide en 3 secciones verticales. Izquierda, centro y derecha. Utilizamos estas áreas para determinar si existe un obstáculo en esas áreas y si es así dirigir el robot a distancia. Estas bandas se destacan en un lado de la imagen original para que podamos verificar su corrección. Las áreas más claras en estas imágenes de la señal que el objeto esté cercano. Esto le indica al robot a moverse lejos de esa dirección.
La desventaja de esta técnica es que los objetos tienen textura. De la siguiente imagen podemos ver dos bloques rojos que se colocan en la misma posición que las latas pero no responden a esta técnica. El problema es que los bloques rojos no tienen cualquier textura interna. Este requisito de la característica es similar a la necesaria para estéreo y las técnicas de flujo óptico.





")
 Básicos Arduino Robot buscador de luz!")






