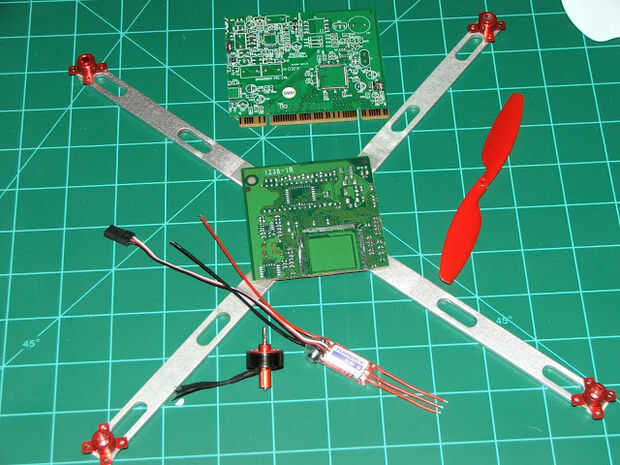
Hace unos años compré un mini quad copter para mí como un regalo de Navidad. Aprendí a volar este helicóptero mini quad y que me inspiró bastante para construir un helicóptero cuádruple DIY. Decidí aprender más acerca de estos micro electrónico así que esto es lo que he creado. Para un marco más estable he utilizado cuatro brazos de aluminio de una matriz de almacenamiento de disco duro ordenador viejo. (dimensiones - en 13 x .5in x o 330,2 mm x 12.7 mm) Para la base de montaje cosechó una vieja tarjeta de red 10/100 baseT y quitar todas las virutas del ic, resistencias y había soldado de piezas que estaban en el tablero. Me corte por la mitad y super pegados los brazos a la Junta. Como se muestra en la imagen de arriba.
Aquí está mi lista de piezas: * Nota - gracias por el comentario
-Compré todo, desde hobbyking.com - internacional
- (4) Turnigy 1811 2900kv Outrunner motores sin escobillas (todos de 4 - $47 USD)
- (4) Tunigy felpa 6A /.8bec/6g controladores de velocidad (4 - 44 USD)
- (4) 5030 hélices (rojo) - 3xCW y 3xCCWKK2.0
- Tablero de Control de vuelo de multi-rotor LCD (1) - KK2 - $20 USD
- (1) Turnigy 9x8cv2 receptor
- (1) tablero de distribución de energía multi-Rotor
- (1) Turnigy 1000mAh 2S 30 C Lipo batería - $6
Durante la compilación inicial intenté algunas configuraciones diferentes, pero encontrar la mejor configuración a continuación. Los controladores de velocidad electrónicos y tarjeta de red se unen a los brazos con doble cinta adhesiva de 3 M de Lowe. Utilicé una combinación de super pegamento y 3M la cinta para el tablero de distribución multi-rotor. Llevé los cables de señal, rojo y negro los cables hacia arriba por en medio de la Junta; Luego corte a longitud y soldado rojo/negro conduce al tablero de distribución.












