Paso 5: Paso 4: GPIO y Python
Ahora tenemos nuestros motores conectados y es el momento de obtener el control sobre ellos. Esto lo haremos con secuencias de comandos de Python. Vamos a crear cuatro secuencias de comandos diferentes, uno para cada dirección.
- Adelante – ambos motores adelante – Pin 17 alta, Pin 18 bajo, Pin 23 alto, Pin 25 bajo
- Hacia atrás – ambos motores al revés - Pin 17 bajo, Pin 18 alto, Pin 23 bajo, 25 perno alto
- Girar a la derecha – A de Motor delantero y Motor B hacia atrás - perno 17 alta, Pin 18 bajo, Pin 23 bajo, 25 perno alto
- Gire a la izquierda – Motor al revés y remite de Motor B - perno 17 bajo, Pin 18 alto, Pin 23 alto, Pin 25 bajo
Para empezar comenzamos con la instalación de las herramientas de desarrollo de Python y las bibliotecas GPIO para Raspberry Pi;
Ahora estamos listos para escribir nuestros guiones.
Creta el primero de ellos, llamado forward.py, con este comando;
Y pegue el siguiente código;
Prueba con;
Ahora hacemos lo mismo para el
otros 3 scripts;
backwards.py:
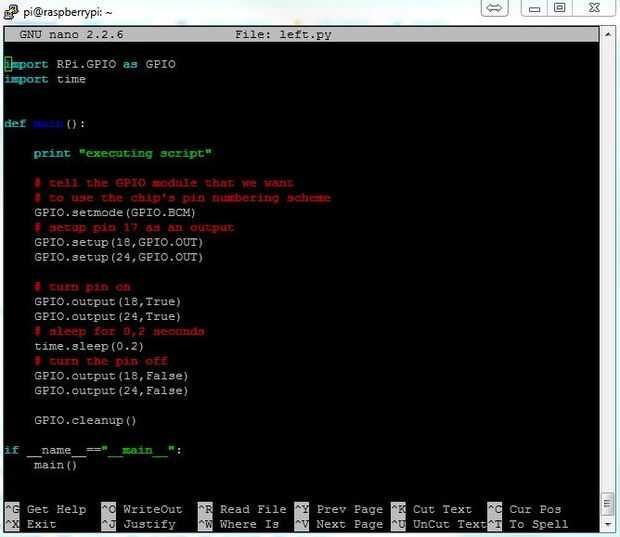
left.py:
Right.py:
Perfecto! Ahora podemos controlar nuestros motores con nuestros scripts cuatro python!













