Paso 7: Paso 6: construir el Robot






¡ Construyamos! Empecé con los motores y después de algunas pruebas encontré
el mejor engranaje de velocidad vs torque.
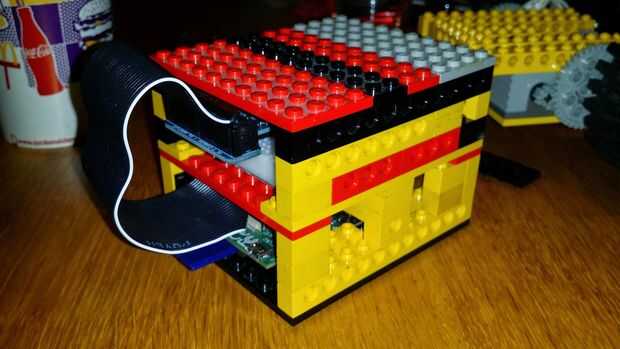
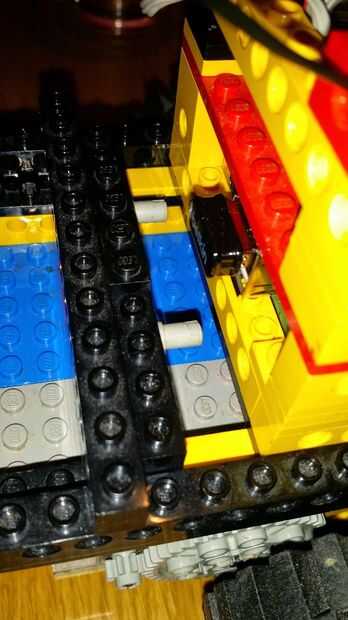
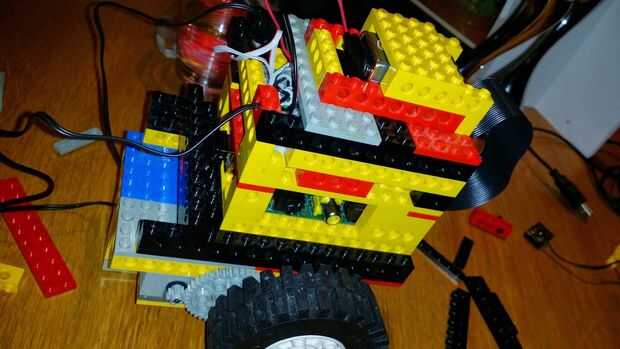
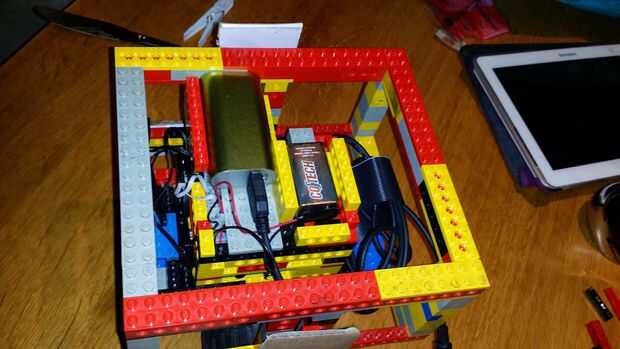
Luego seguí sólo edificio para obtener todos los componentes es el lugar adecuado. Difícil de explicar cómo, ver mis fotos para una mejor guía. Quería el robot tener piernas, aunque no usarlos para caminar... Pero creo que se ve mejor y más como un Robot.
Entonces utilicé algunos residuos mache papel y cartón y después de algunos pintan. Para el cuello utilicé una botella de cola de Coco. Una vez más, ver mis fotos!
Eso es todo! El Robot está listo para usar!
La última es un desde distancia módulo de medición (RCW-0002) que impide que el robot ejecuta las cosas y añadido un script uno mismo-conducción que correr hacia adelante hasta que se pone alrededor de 10 cm de cualquier cosa. Luego el robot se detiene, va hacia atrás 1 segundo y girar a la izquierda de unos 45 grados y hacia adelante otra vez. Funciona bien con por ejemplo las paredes, pero piernas de la silla y otras cosas son todavía un problema. Yo lo necesito unos más RCW-0002 Unido y dirigido en diferentes Ángeles que hacerlo trabajar perfecto.













