Paso 2: Pegar las piezas



Estoy usando pegamento caliente ya que es suficientemente robusto para la necesidad, funciona muy bien con PLA y por otra parte, puede fácilmente ser totalmente eliminado si se ha pega algo mal.
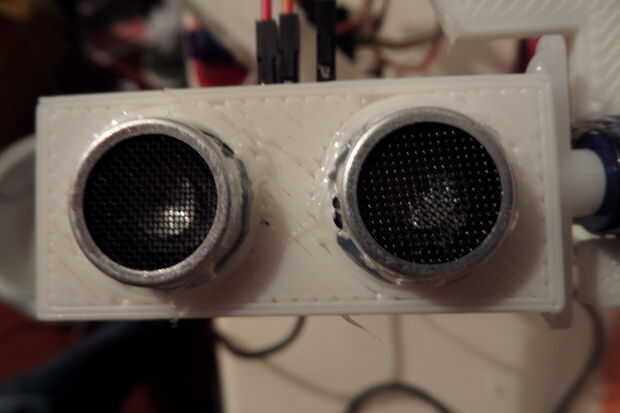
Telémetros ultrasónicos :
Poner un poco de pegamento en el cristal, entonces la ayuda del pegamento. Solidificar los barriles. Un cuerno del servo en el lado del pegamento.
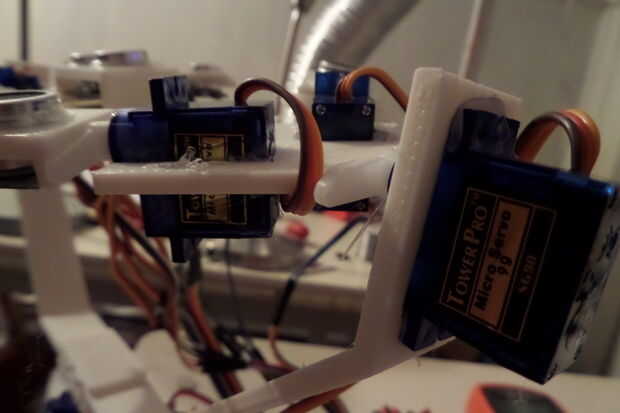
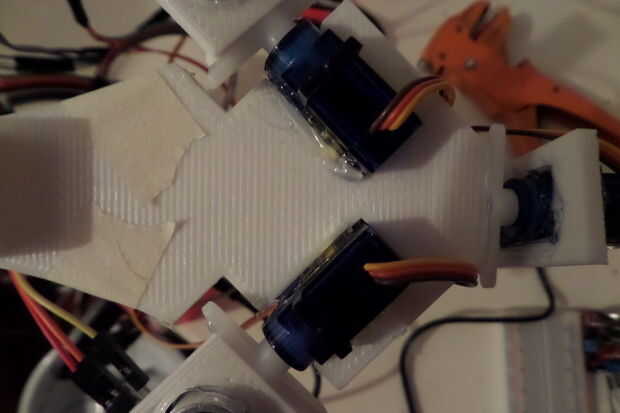
Sección central :
Pegue los 4 servos en sus casillas correspondientes. Debe pegar a la estructura en su centro. Cinta adhesiva o pegamento sus cables en la parte trasera. Pegue la central telémetro ultrasónico en el centro.
Base :
Pasar los cables de servo en el agujero del soporte, luego pegue el servo a él. Usted puede poner una abrazadera para fijar el robot en una tabla. Además, puede pegar el arduino a él mediante un 3D impreso de apoyo.
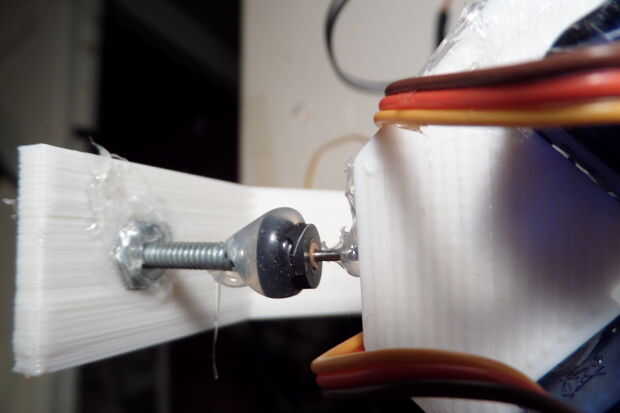
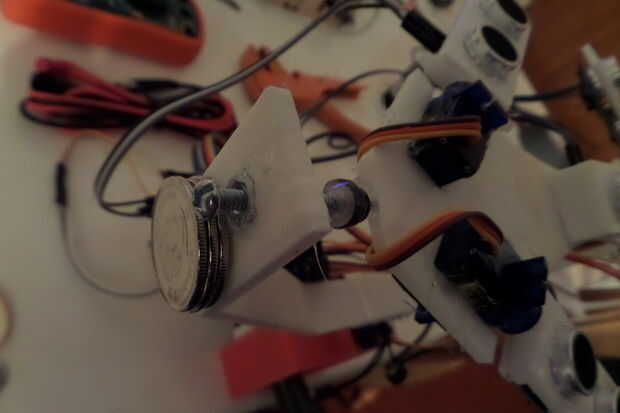
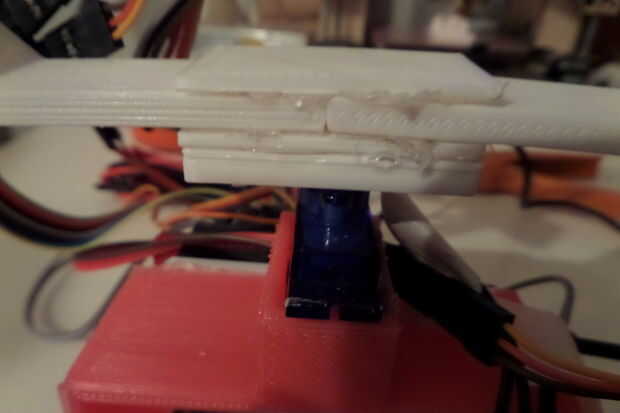
Soporte de montaje :
Pegue las dos partes junto con la pequeña base. Colocar el cuerno del servo el servo de la base, luego pegar la parte inferior de la abrazadera de montaje a él. Hay un agujero para solidificar este cruce, no dude en rellenar con pegamento caliente. Un servo para el agujero cuadrado en la parte superior del soporte del pegamento, hacia el interior y en la parte superior del engranaje. Pegue las 2 tuercas en la parte superior de otro soporte, inserte el tornillo, pegue el rodillo a la punta de la misma. Pegar la varilla pequeño en el frame central. Para montar el bastidor central, desenroscar para hacer un poco de espacio y, a continuación, inserte la varilla en el rodillo y el tornillo hasta que todo esté seguro. Esta parte del robot es un poco frágil, quizás tenga que reparar a menudo. Por último, pegamento tres 25 centavos por debajo de las tuercas (esto es un contrapeso del servo).












