Paso 3: Conectar los Servos y los sensores y construir el circuito
Conectar todos los cables para sacarle un poco desordenada (hablo por experiencia...). Use una buena cantidad de metodología. Tenga en cuenta que usar una configuración de un pin de datos de los sensores ultrasónicos. En el modelo que utilizo, el gatillo y el eco están en pines separados, por lo que he puesto un pequeño puente.
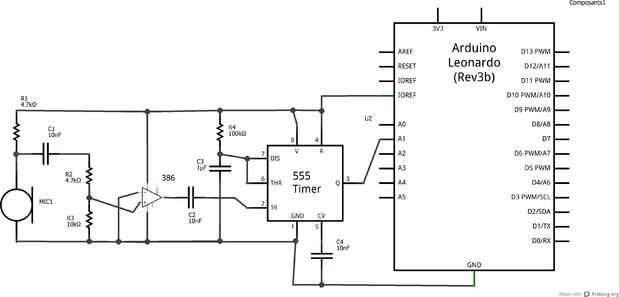
Aquí está el listado de los pines para la conexión con arduino:
2: base servo (theta)
3: no conectado es por interferencia
4: servo de la izquierda y arriba
5: servo abajo & izquierda
6: servo y derecho
7: servo hacia arriba y derecha
8: sensor up & izquierda
9: sensor abajo & izquierda
10: sensor hacia abajo y derecha
11: sensor hacia arriba y derecha
12: sensor de medio
A0: tilt servo (phi)
A1: Entrada de sonido
Conecte el Vcc del sensor a los 5V regulados por el arduino.
Importante: Conecte el Vcc de los servos a una fuente externa de 5V (de lo contrario, el Arduino va a sufrir...)
Conectar entre sí todos los motivos.
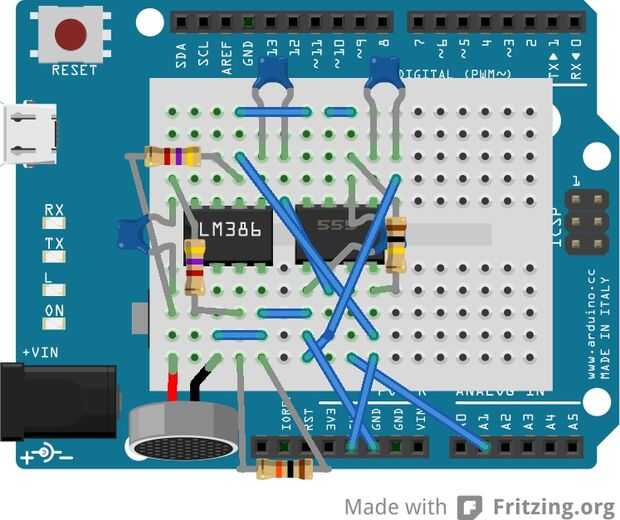
He apuntado una foto de mi protoboard junto con esquemas. Es un poco compacta, que se puede ver que el espacio no utilizado en el protoboard shematic es en realidad llena de cables de alimentación para los servos y los sensores. Ya que hay no hay guías de suministro en un protoboard mini, es más difícil entender el circuito y para solucionar problemas. No se trata de un circuito complejo, tómese su tiempo y todo irá directo. El divisor de tensión antes de que el LM386 puede ser sustituido por un potenciómetro de ajuste para un control más preciso sobre la sensibilidad del micrófono.












