Paso 5: ¿Por qué correr plazas?
Bien, hasta ahora para el Dead Reckoning: continuamente estimar, actuar y corregir errores. Incluso cuando se ejecuta muy bien, es sólo un modelo de la realidad. Ya describí un montón de disturbios que ninguna parte del modelo. Así, por definición el bot nunca funcionará exactamente recto (100%) o voluntad nunca girar exactamente 90 grados.
El impacto de una desviación de la dirección que conduce es sustancial (cuando se conduce en una nueva dirección, el bot nunca terminará por donde se supone que). Es una buena razón para calibrar más.
Afortunadamente hay una manera simple de hacerlo. Borenstein et. otros desarrollaron un método que se describe ampliamente en:
UMBMark - un método para medir, comparar y corregir errores de cómputo muerto en Robots móviles
( http://www-personal.umich.edu/~johannb/umbmark.ht... )
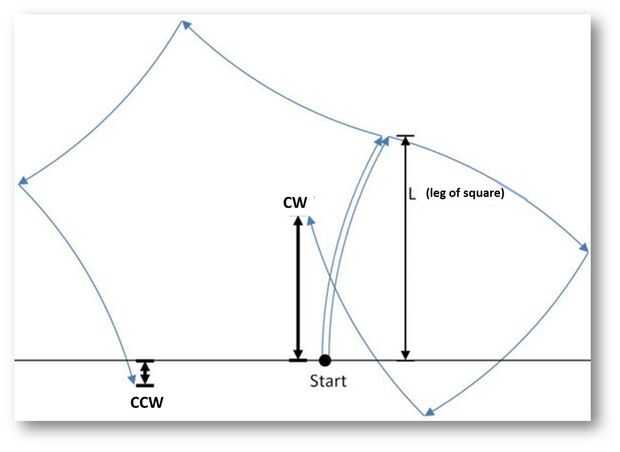
En Resumen Este método trata de abajo: ejecutar un cuadrado hacia la derecha y luego ejecutar la misma Plaza hacia la izquierda. La imagen de abajo muestra una acentuada proyección de la trayectoria real. CW y CCW son los errores que pueden ser medidos después de ejecutar una plaza. El error de ángulo puede calcularse como:
(CW + CCW) / longitud de una pata cuadrada
Opcional este error puede ser multiplicado por una ganancia. Finalmente puede agregarse este error como un error constante en la parte controlada para equilibrar las ruedas.
Eso es todo por ahora!





 son cuadrados!")
 / asesino de vampiro")





")
