Paso 10: Terminando

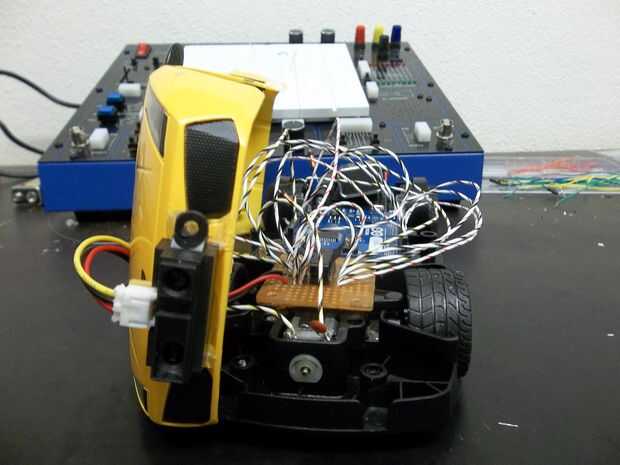


Una vez que terminé mi circuito final y obtiene energía para mi Arduino, configurar los componentes dentro del coche. Utilicé una pistola de pegamento caliente para mantener el soporte perfboard y batería en su lugar. Para colocar el sensor en frente desenroscarse del parabrisas del coche un poco y me alimenta el sensor a través de un boquete pequeño. Yo entonces caliente pegarlo en la parte delantera. Una vez que todos los componentes en su lugar, subido algo de código en el Arduino conectado la fuente de alimentación y atornillada en la película de plástico en su lugar.
Donde estamos ahora:
Bueno, el plan original era para conectar el receptor salida Arduino así el coche funciona normalmente hasta que consiguió demasiado cerca de una pared. Sin embargo... cuando intenté soldar las conexiones a los pines del receptor el receptor dio para arriba en mí. Realmente lo consiguió al punto donde pude leer la tensión correcta de las conexiones soldada el receptor, pero los pernos se interrumpió después de un tiempo.
Plan B:
Así que ahora que no puedo controlar el coche con el mando decidió programar el coche y hacerla autónoma. Estoy todavía en proceso de hacer totalmente autónoma (algo parecido a una Roomba) pero, al menos he conseguido al punto fueron detecta una pared y se detiene. También puedo hacer el frente neumáticos encender basado en comandos de Arduino. Te incluyo el fragmento de código que conozco obras seguro abajo.
Cosas posible para el futuro:
Espero poder conseguir el coche hasta el punto donde es completamente autónomo. Además, creo que hay una manera de retomar las funciones control remoto el coche mediante un módulo de Bluetooth como el BlueSMiRF plata. Dicho módulo me permitiría controlar el coche de un ordenador habilitado para Bluetooth o un teléfono que sería cool. Otra cosa que noté es que las pilas que he usado han sido vaciadas rápidamente. Esto significa que podría tener que cambiar la forma en estoy alimentando el circuito. En otras palabras, tendría que utilizar algo más que una batería de 9v.
Si puedo, voy a publicar cualquier evolución que hacer. Pero por ahora, sólo puede detectar paredes y dejar en consecuencia.
Gracias por leerme y espero que haya encontrado este informativo.
Código:
Los pines que vamos a usar la etiqueta
int enable12 = 7;
int input1 = 6;
int entrada2 = 5;
int enable34 = 4;
input3 int = 3;
int input4 = 2;
void setup() {}
Serial.Begin(9600); Ajuste de la velocidad
Configurar los pines necesarios como salidas
pinMode(enable12,OUTPUT);
pinMode(input1,OUTPUT);
pinMode(input2,OUTPUT);
pinMode(enable34,OUTPUT);
pinMode(input3,OUTPUT);
pinMode(input4,OUTPUT);
Fije los pernos permiten a alto
digitalWrite(enable12,HIGH);
digitalWrite(enable34,HIGH);
}
void loop() {}
int sensorValue=analogRead(A2); leer el valor de sensor
Serial.println(analogRead(a2)); nos permiten ver la
valor del sensor para la solución de problemas
Delay(1); pequeño retraso para la estabilidad
Si {} (sensorValue < 150)
goForward();
}
Else {}
stopMovement();
}
}
Funciones utilizadas para controlar el movimiento del coche
void goForward() {}
digitalWrite(input1,HIGH);
digitalWrite(input2,LOW);
}
{} void goBack()
digitalWrite(input1,LOW);
digitalWrite(input2,HIGH);
}
void stopMovement() {}
digitalWrite(input1,LOW);
digitalWrite(input2,LOW);
}
void goLeft() {}
digitalWrite(input3,HIGH);
digitalWrite(input4,LOW);
}
void goRight() {}
digitalWrite(input3,LOW);
digitalWrite(input4,HIGH);
}
void stopTurning() {}
digitalWrite(input3,LOW);
digitalWrite(input4,LOW);
}





")






 Modelo de elevador usando Arduino, App Inventor y otros software libre")
