Paso 5: Medir tensiones

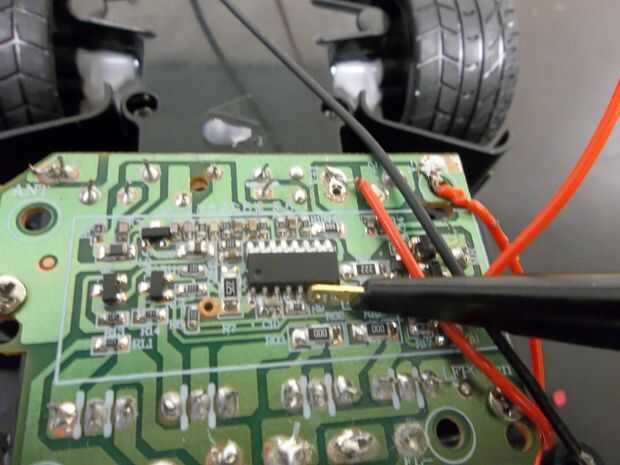

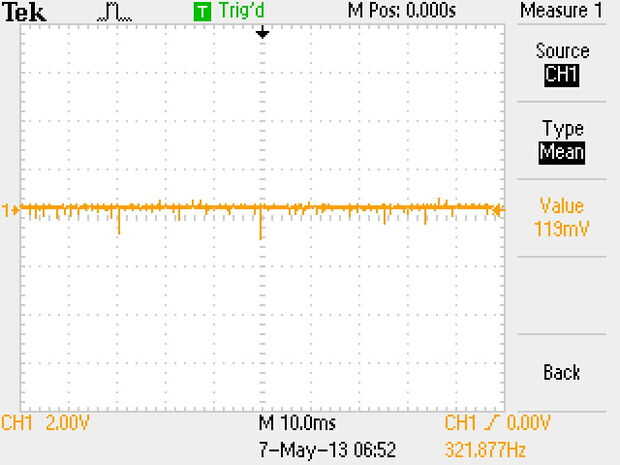
Busca en el receptor:
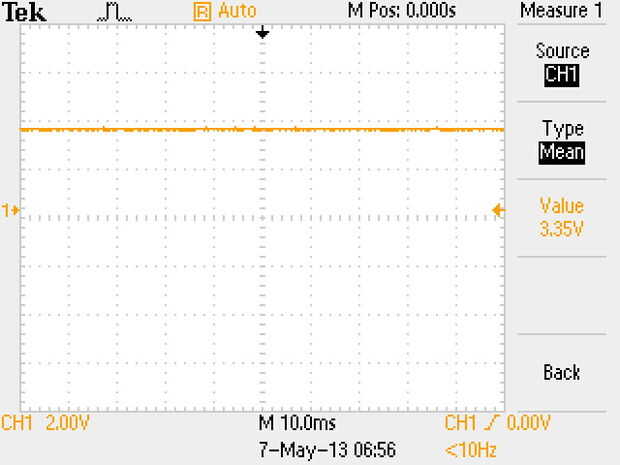
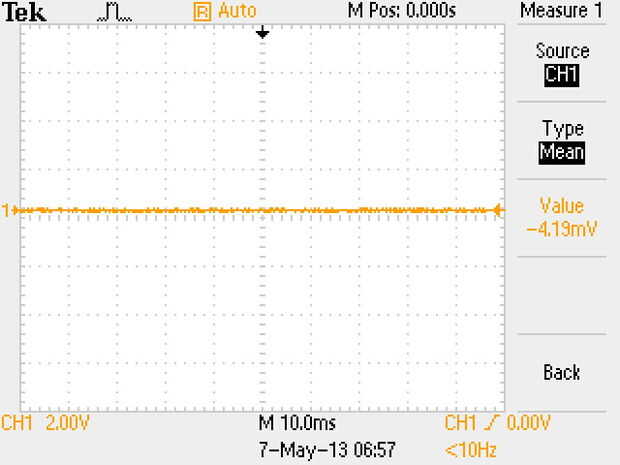
Para comenzar medido los voltajes que salen de pines del receptor como utilicé el control remoto. Cuando un perno alto el voltaje sería aproximadamente 3,40 voltios. Cuando el perno fue baja sería casi cero voltios. Estas tensiones están dentro del rango necesario para la Arduino a leer correctamente como alta o baja.
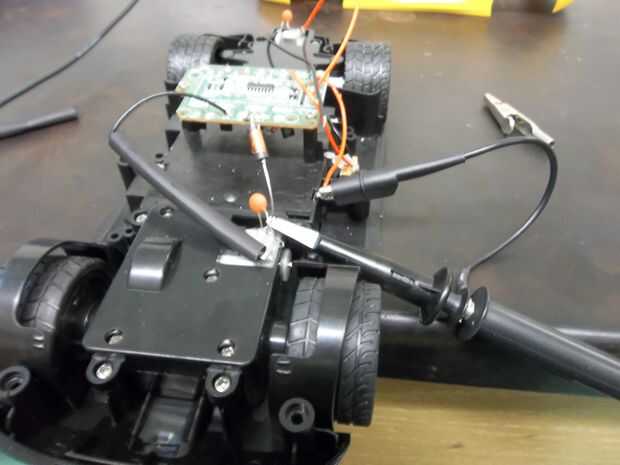
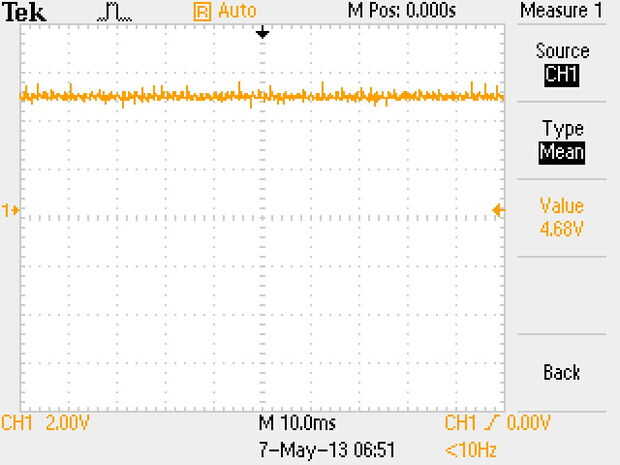
Busca en los motores:
Entonces medí la tensión en las conexiones a los motores de DC. Cuando entrada el motor fue alta la tensión van desde 4,80 5,00 voltios. Y por supuesto, cuando la entrada se baja el voltaje era cero.
Dependiendo de la velocidad seleccionada o la dirección, las conexiones a los motores alternativamente ir alta y baja. Por ejemplo, cuando el coche a la izquierda el cable con la etiqueta ML (mover a la izquierda) iba alto y el cable con la etiqueta a Señor (mover a la derecha) pasa bajo. Es todo lo contrario al derecho, y cuando hay entrada ambos cables son bajos.





")






 Modelo de elevador usando Arduino, App Inventor y otros software libre")
