Paso 7: Configuración de un prototipo: control de la


Conducción de un Motor:
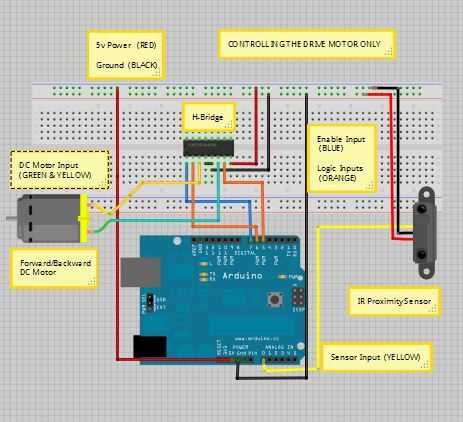
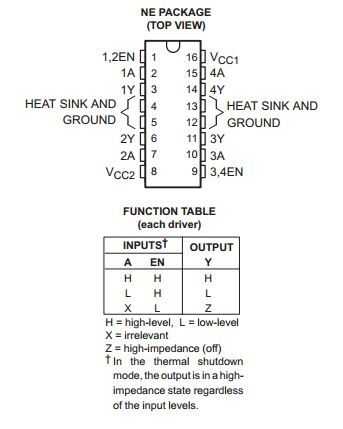
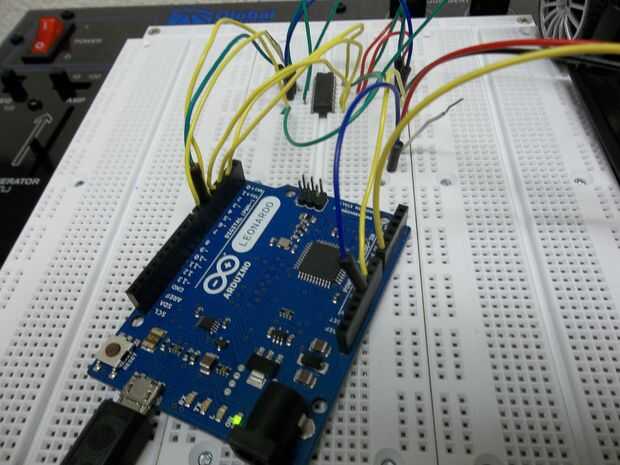
Empecé a simple por conducir con un motor. Conecté el pin Enable y las dos entradas lógicas desde el puente de H a tres de los pines digitales en el Arduino. Ajuste el pin Enable HIGH (con comando de digitalWrite() de Arduino), entonces podría hacer el motor gire hacia la derecha o izquierda dependiendo de cual de las dos entradas lógicas puse alta y que bajo. He incluido la tabla lógica de puente H en los cuadros de referencia. Conexión de pines de salida del puente H para el motor de la C.C. podría hacer los neumáticos gire a la izquierda/derecha (o hacia delante/atrás dependiendo el motor).
Prueba el circuito:
Para probar el circuito escribí simple código de Arduino que los neumáticos a la izquierda y la derecha cada otro segundo (o adelante y hacia atrás para que el otro motor). Esto consistió en alterna que Arduino pines conectan a las entradas de la lógica fueron fijados en alta y baja. Recuerde que el osciloscopio y el comando Serial.println() en Arduino son tus amigos durante la resolución de su circuito.
Para probar el Sensor de proximidad infrarrojo, usé el mismo código de prueba como antes excepto que leí en el valor del sensor a través de un pin analógico. Luego usé un if declaración y el valor del sensor para controlar cuándo funcionaría mi código de prueba.
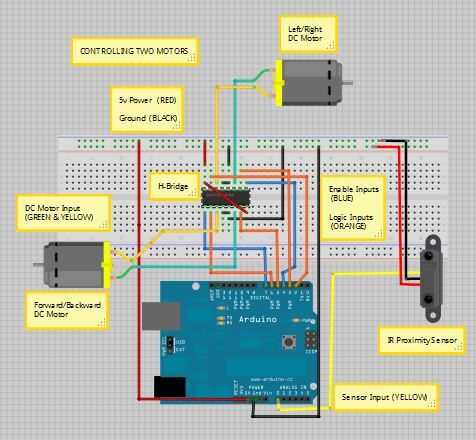
Manejar dos motores:
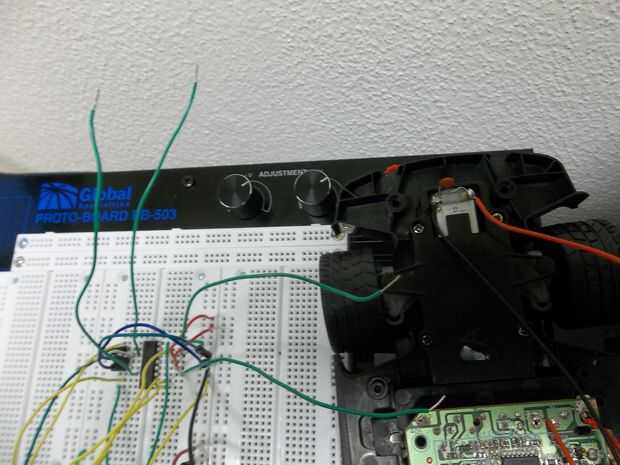
Dos motores de conducción no es diferente de una conducción. Su mismo tratar ya que el chip del puente H es simétrico. Para el sistema de antichoque usted realmente sólo necesita controlar el motor delantero/al revés pero al conectar el segundo motor le puede programar el coche por sí mismo (por ejemplo, no figura ochos, tenemos especie de un modo autónomo como un Roomba, etc..). Soldar los cables en mi coche no fueron los mejores por lo que decidí controlar ambos motores con Arduino.
Hoja de datos del sensor:
http://www.Phidgets.com/documentation/Phidgets/3520_0_Datasheet.pdf
Incluye la hoja de datos del puente en H pdf abajo.





")






 Modelo de elevador usando Arduino, App Inventor y otros software libre")
