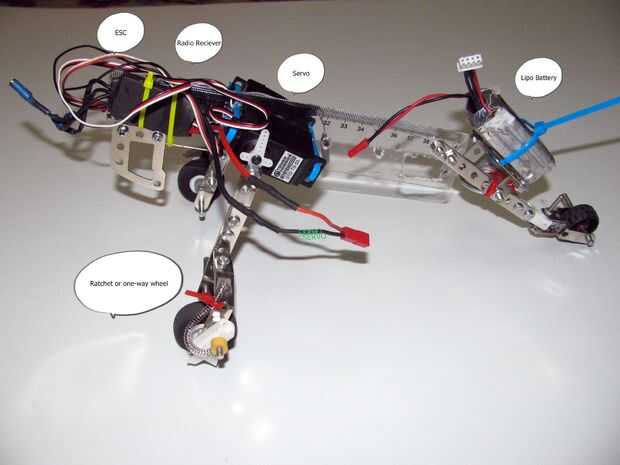
Técnicamente esto no es un robot que no tiene sensores y no es autónoma, pero podría ser roboticized. Es realmente sólo una investigación sobre el movimiento del tipo de robot y fue más fácil para mí lograr que la utilización de radio control en lugar de control por microprocesador.
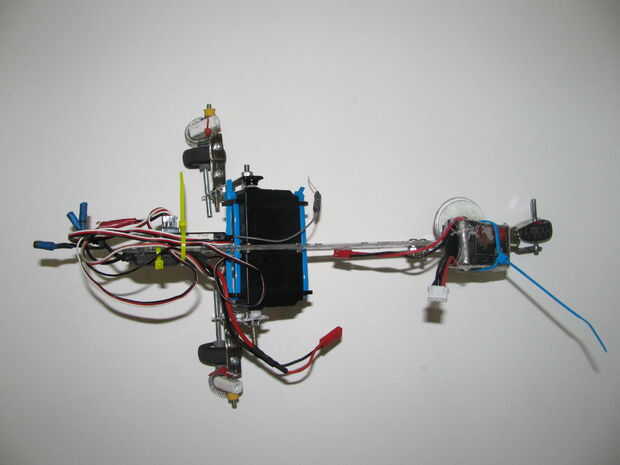
El bot reptante, cuyo nombre es carraca, fue construido usando una regla de acrílico para el chasis junto con unos trozos de soporte metálico perforado para la sección de cola y los brazos.
Dos servos sirven para mover los brazos a 180 grados y las ruedas unidireccionales permiten solamente hacia adelante pero no hacia atrás balanceo de las ruedas. Esto es lo que le da su tracción trinquete, de lo contrario sólo sería hacer girar sus ruedas hacia adelante y hacia atrás con ningún movimiento hacia adelante del cuerpo. Sólo un dos canales de radio es necesaria para mover la trinquete.
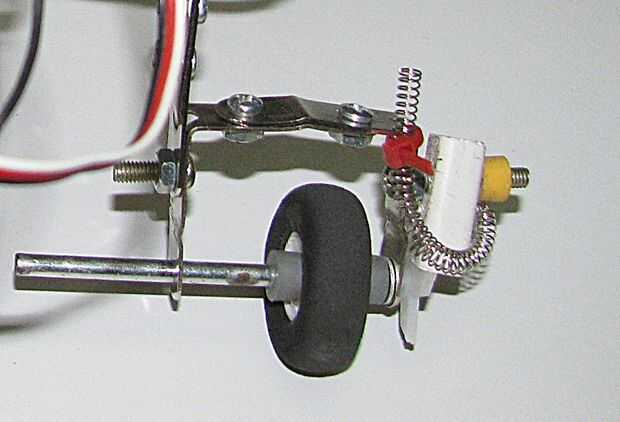
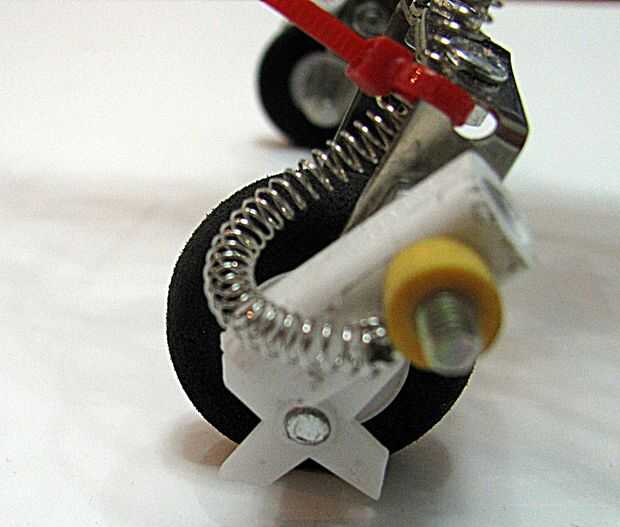
El trinquete o rueda unidireccional es construida por pegar un cuerno del servo cuatro brazo a un semieje y haciendo un trinquete de tubería plástica que sólo permite que el eje gire en una dirección. Un resorte se une al trinquete y el soporte del eje para mantener la tensión en el trinquete contra el cuerno del servo. Me puse a buscar un juguete que tenía trabajando ruedas unidireccionales pero no tuvo mucha suerte encontrar uno así que tuvo que recurrir a mi propia ejecución torpe.
Como se puede ver en el vídeo, movimiento hacia adelante se logra moviendo ambos brazos hacia delante y atrás o independientemente. Giro es un poco más complicado y requiere mover un brazo hacia adelante, otro atrás y moviendo la cola hacia arriba y alrededor. Yo todavía no he conseguido bajarla muy bien. A veces que se tire hacia adelante demasiado rápido y trinquete termina en su nariz haciendo un headstand.
Creo que uno puede averiguar cómo trinquete está trabajando en las fotos. Sería interesante tratar de crear un robot real de trinquete.

")








")


